A tracking control method, device and medium for a redundant robotic arm
A tracking control and manipulator technology, applied in the field of tracking control of redundant manipulators, can solve problems affecting the accuracy of model information and the accuracy of control schemes
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
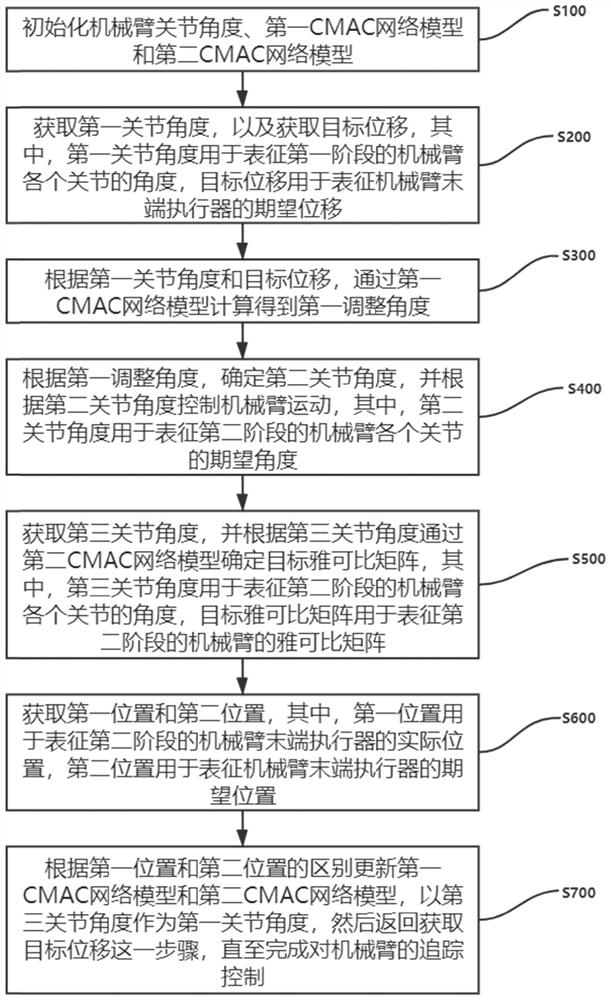
[0060] In order to make the purpose, technical solution and advantages of the present application clearer, the present application will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present application, and are not intended to limit the present application.
[0061] In order to make the content and technical solutions of this application clearer, the following describes the characteristics, terms and meanings of related technologies involved in this application:
[0062] When the number of driving degrees of freedom of the manipulator, such as joint angles, is more than that required to complete the task, the manipulator can be called a redundant manipulator. The extra degree of freedom makes the redundant manipulator have higher flexibility and safety, so this kind of manipulator has broad potential application prospects in va...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com