Pneumatic servo system self-adaptive neural network control method considering state limitation
A neural network control and servo system technology, which is applied in the field of high-precision position tracking control of pneumatic position servo systems, can solve the problems of inaccurate model zero point and limited state, and achieve the effect of effective control, high tracking accuracy, and reduction of unknown disturbances.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
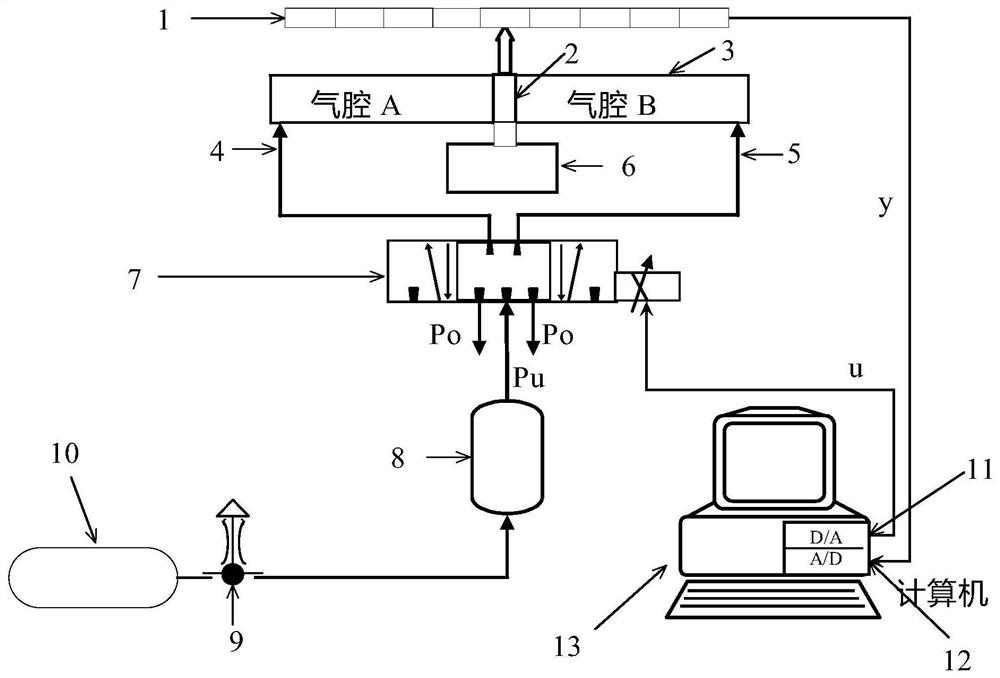
[0123] In this embodiment, the product models selected by the main components in the pneumatic system are:
[0124] Cylinder 3 adopts the model DGPL-25-450-PPV of FESTO Company;
[0125] The model used by the proportional valve 7 is MPYE-5-1 / 8-HF-010-B;
[0126] The model used by the position detection element 1 is MLO-POT-450-5TLF;
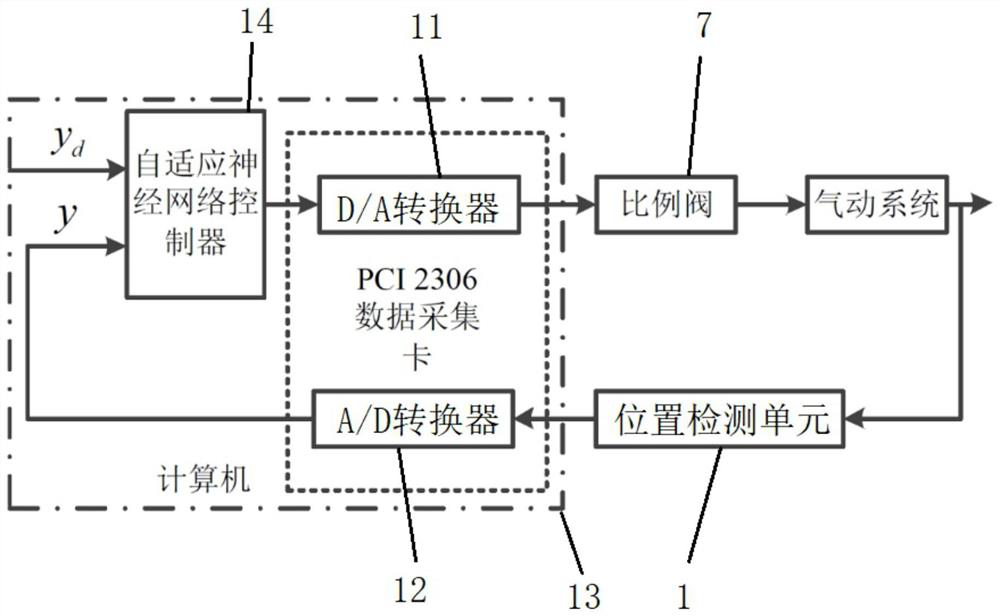
[0127] The model used by the data acquisition card is PCI2306;
[0128] The model that computer 13 adopts is that CPU is P21.2GHz, and the control software built-in in computer adopts VB to compile, shows the change curve of relevant variable in the control process through the screen.
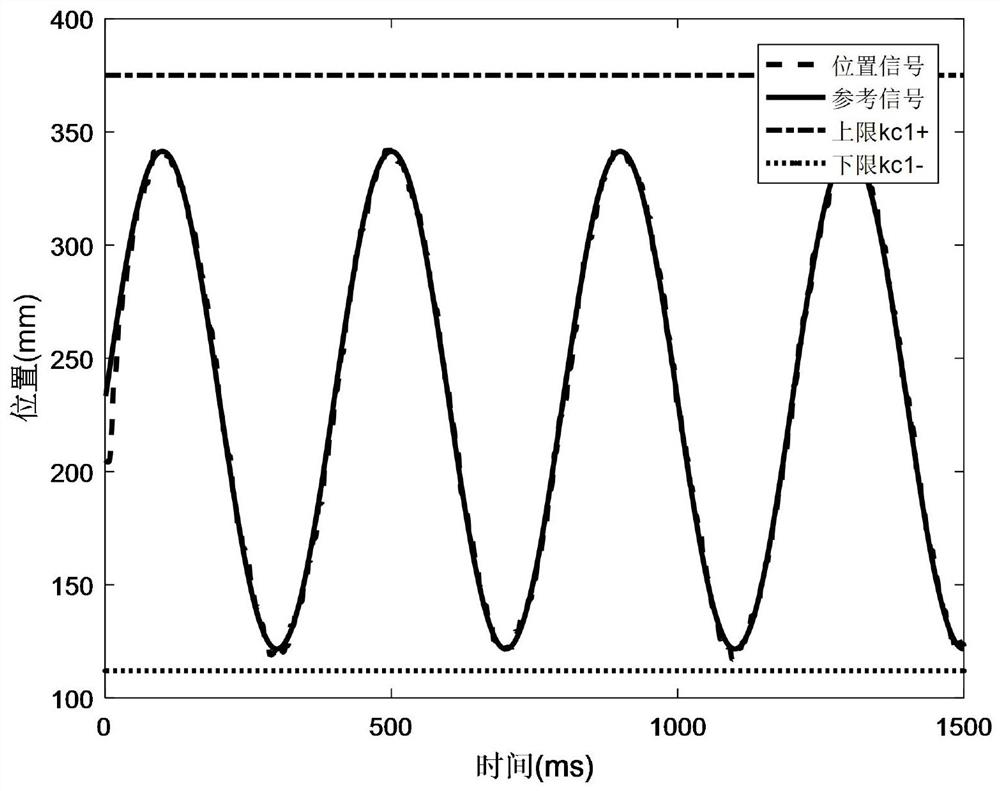
[0129] The control objectives of this embodiment are respectively set as
[0130] Reference signal 1: The sinusoidal signal is:
[0131] the y d =A 1 sin ω 1 t (24)
[0132] Among them, A 1 = 111.65, ω 1 =0.5π.
[0133] The expression of the S-curve signal is:
[0134] the y d =-(A 2 / ω 2 )sin(ω 2 t)+(A 2 / ω 2 )t (25)
[0135] Among them, A 2 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com