Mechanical arm and surgical navigation positioning system
A robotic arm and limit slot technology, used in surgical navigation systems, surgical manipulators, surgery, etc., can solve the problems of large number of trolleys, unfavorable information interaction, large impact of brake electromagnets, short life of electromagnetic brakes, etc., to reduce motion. The effect of planning difficulty, improving accuracy, and facilitating surgical operations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] The present invention will be further explained below in conjunction with the accompanying drawings and specific embodiments.
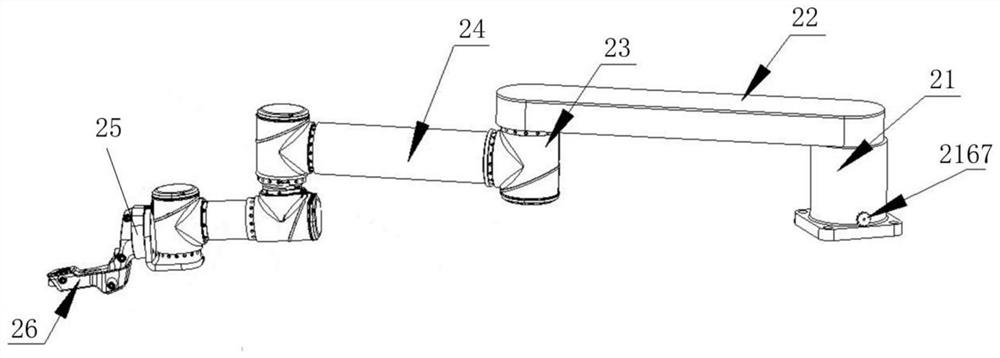
[0060] figure 1 It is a structural schematic diagram of the mechanical arm of the present invention, as figure 1 As shown, the mechanical arm of the present invention includes a base joint 21, a passive arm 22, and several connecting rods 24 connected sequentially through the joint 23, wherein the base joint 21 is fixedly installed, and the driven arm 22 is rotatably installed on the base joint 21. The first Two connecting rods 24 are connected with the ends of the passive arm 22 through joints 23. The end of the last connecting rod is the end of the mechanical arm 25. An end bracket 26 is fixedly installed on the end of the mechanical arm 25, and an execution sleeve is installed on the end bracket 26. . A manual brake is provided in the base joint 21. The mechanical arm of the present invention is composed of the degree of freedom of the pas...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com