A 3D Model Based UAV Coverage Path Planning Method
A 3D model and coverage path technology, applied in the field of UAVs, can solve the problem of being unable to evaluate the full coverage of UAV flight routes, and achieve the effect of reducing costs and improving detection efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] Below in conjunction with accompanying drawing of description, the present invention will be further described.
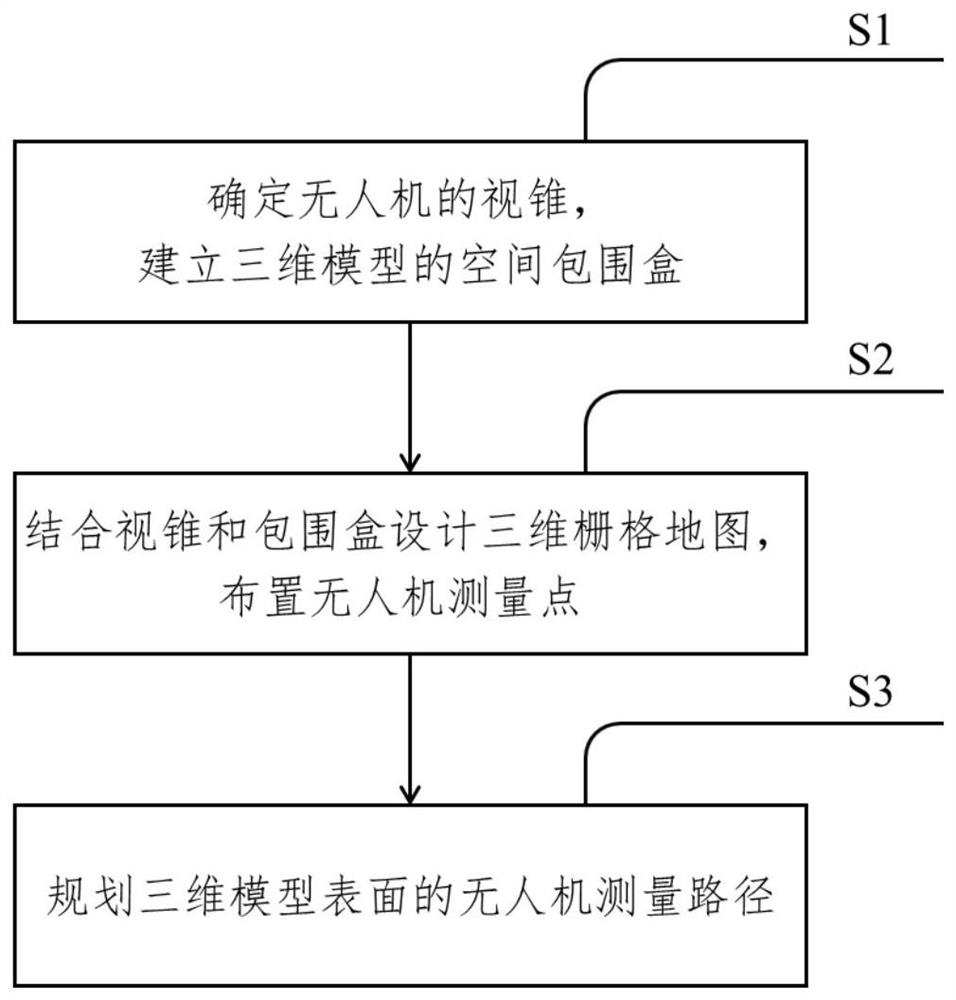
[0043] The present invention provides a large-scale flexible body deformation monitoring device and method, taking the aircraft surface detection task as an example, such as figure 1 shown, including the following steps:
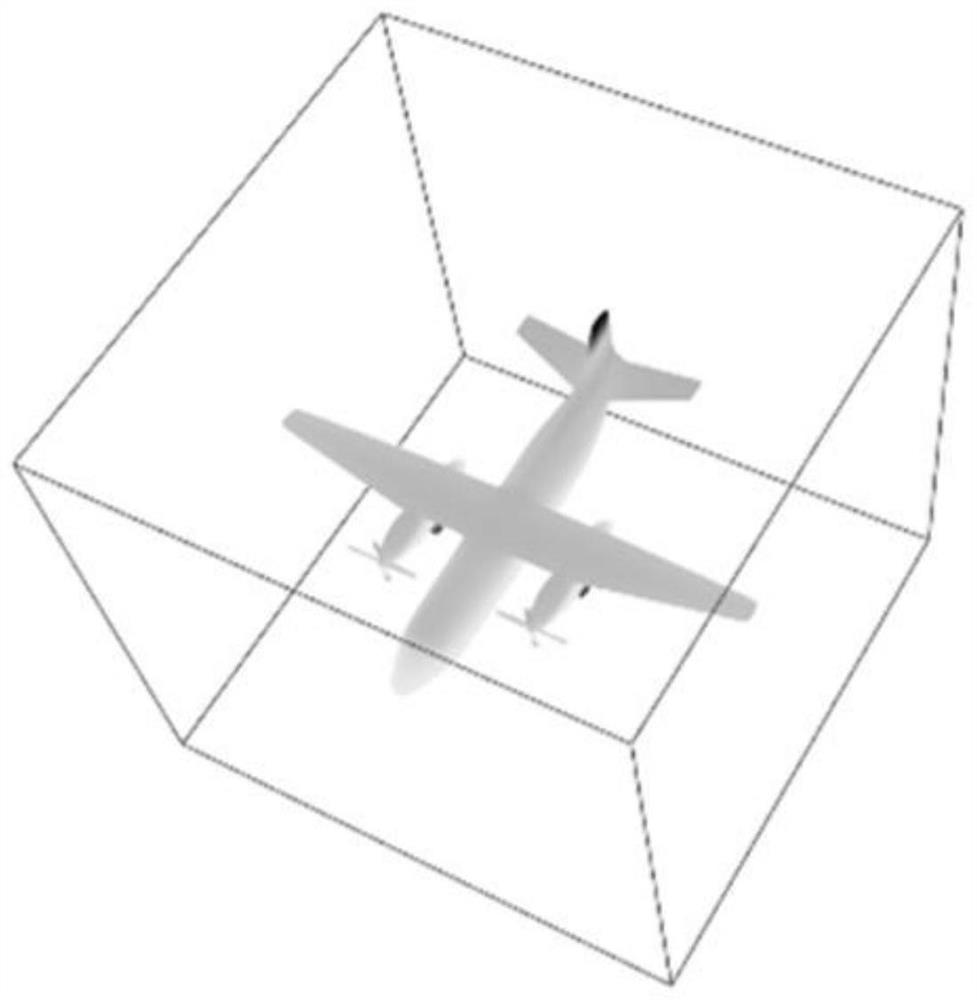
[0044] S1: Determine the size of the viewing cone of the drone, and establish the spatial bounding box of the 3D model;
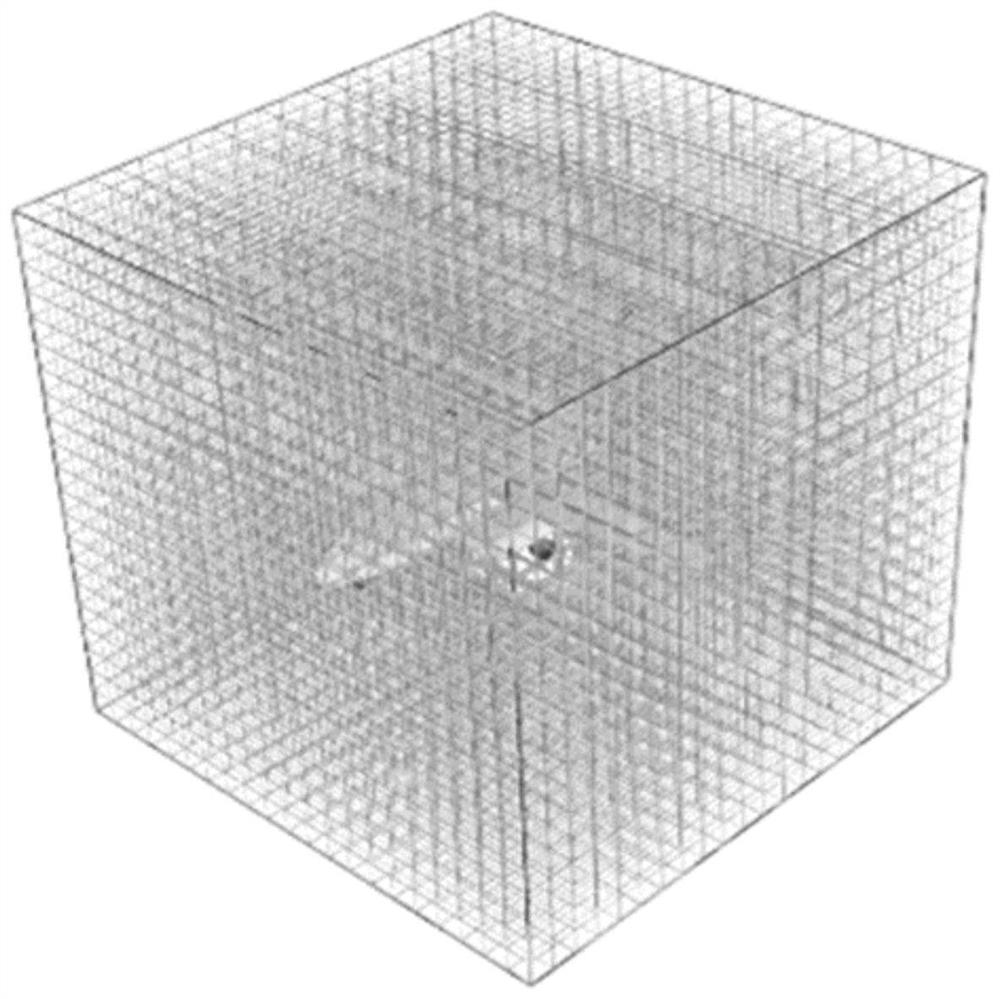
[0045] S2: Design a 3D grid map in combination with the frustum and bounding box, and arrange the UAV measurement points;
[0046] S3: Plan the UAV measurement path on the surface of the 3D model.
[0047] Further, the determination of the size of the viewing cone of the drone and the establishment of a spatial bounding box of the three-dimensional model include the following steps:
[0048] S11: Define the size of the viewing cone of the drone, ensure that the working distance and coverage area of the viewing con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com