Transverse control method of pilotless automobile
An unmanned vehicle, lateral control technology, applied in the direction of automatic steering control components, control devices, steering mechanisms, etc., to avoid sudden changes, avoid sudden changes, and improve stability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040]The present invention will be further described below in conjunction with the embodiments and accompanying drawings, but the present invention is not limited.
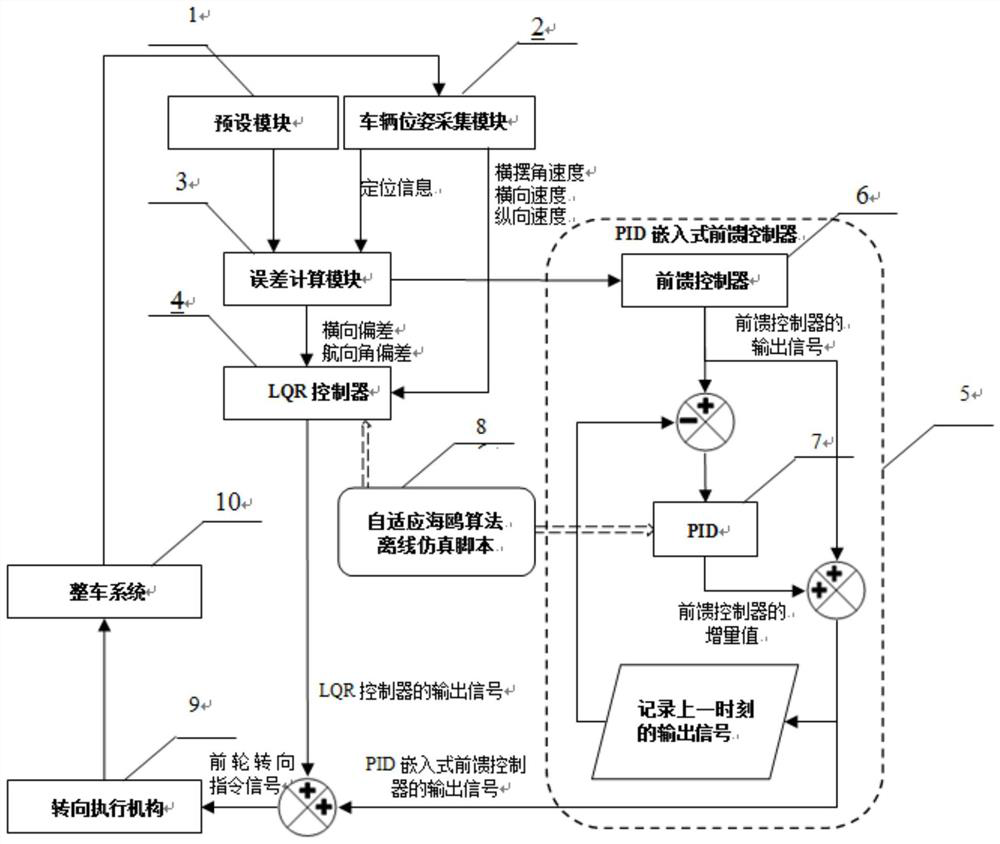
[0041] The lateral control method of driverless car provided by the present invention can be realized by lateral control system, the structure of this system is as follows: figure 1 Shown: including preset module 1, vehicle pose acquisition module 2, error calculation module 3, LQR controller 4, PID embedded feedforward controller 5, adaptive seagull algorithm offline simulation script 8, steering actuator 9 and the whole car system10. The preset module 1 provides preset tracking tracks. The PID embedded feedforward controller 5 includes a feedforward controller 6 and a PID controller 7 .
[0042] The lateral control method includes the following steps:
[0043] S01: The vehicle pose collection module collects vehicle state information and positioning information at the current moment, and the vehicle state in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com