A five-degree-of-freedom fault-tolerant mechanism and an elbow joint rehabilitation robot
A rehabilitation robot and degree-of-freedom technology, applied in manipulators, program-controlled manipulators, passive exercise equipment, etc., can solve problems such as the offset of the rotation axis of the exoskeleton connecting rod and the helical motion axis of the elbow joint, and the secondary injury of patients. The effect of good human-machine coordination performance, large joint motion space, and many redundant degrees of freedom
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0044] The invention provides a technical solution:
[0045] Please refer to Image 6 As shown, a five-degree-of-freedom fault-tolerant mechanism includes a first connecting portion 21, a cross shaft 22 and a second connecting portion 23; the first connecting portion 21 and the second connecting portion 23 are respectively provided with Adapted cross groove 24; the cross shaft 22 is set through the cross groove 24 of the first connecting part 21 and the second connecting part 23, and cooperates with the first connecting part 21 and the second connecting part 23 to complete five degrees of freedom error compensation;
[0046] Please refer to Image 6 , establish the X, Y, Z coordinate system on the first connecting part 21 as shown in the figure, and the five degrees of freedom described in this scheme are moving along the X, Y, Z axes and rotating five around the x, y axes Degree of freedom error compensation.
[0047] The first connecting part 21 includes a connecting pla...
Embodiment 2
[0062] Based on the above embodiment 1, the invention provides a technical solution:
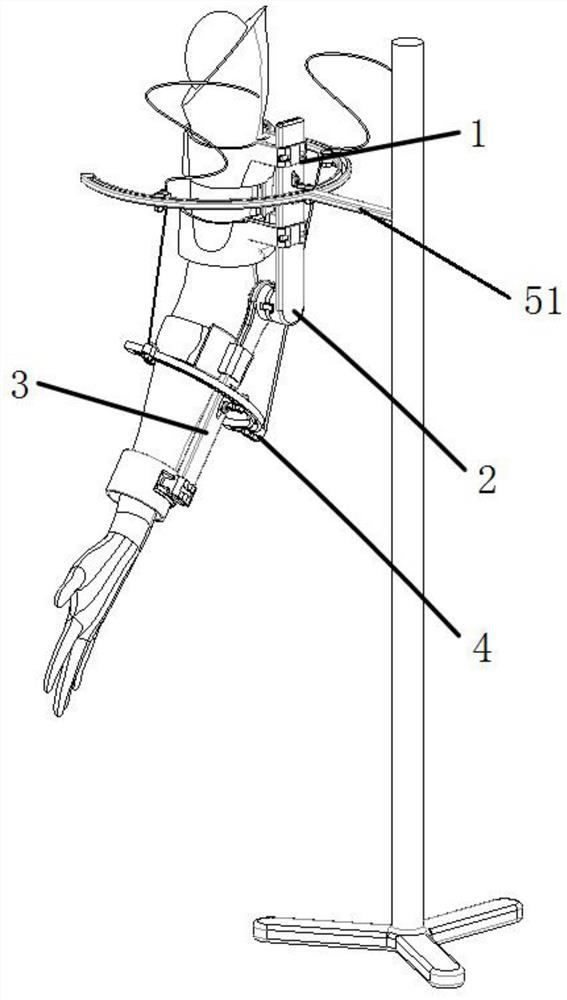
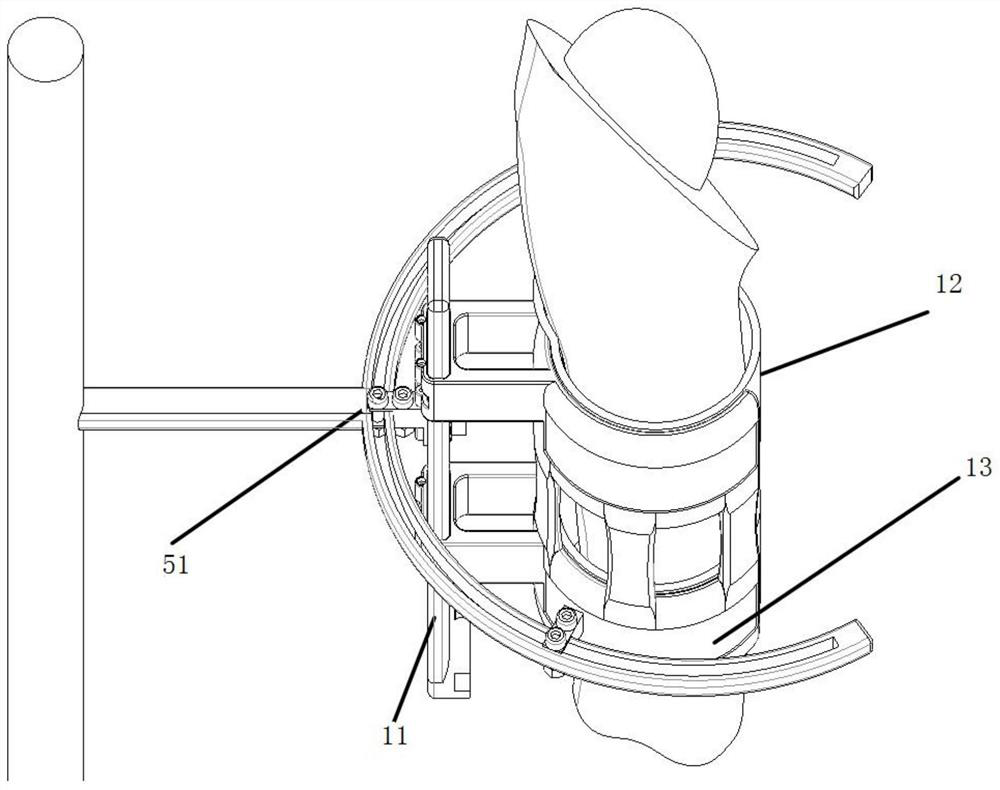
[0063] Please refer to figure 1 , 3 , 12, 13, 14, 15, and 16, a kind of elbow joint rehabilitation robot includes an upper arm fixing component 1, a five-degree-of-freedom fault-tolerant mechanism 2, a forearm fixing component 3 and a rope drive component 4; the five-degree-of-freedom fault-tolerant mechanism 2 is arranged between the upper arm fixing assembly 1 and the forearm fixing assembly 3, and is used for adjusting the elbow joint rehabilitation training; the rope driving assembly 4 is respectively connected with the upper arm fixing assembly 1 and the forearm fixing assembly 3, and the rope driving assembly 4 is The movement of the upper arm fixing assembly 1 and the forearm fixing assembly 3 provides power.
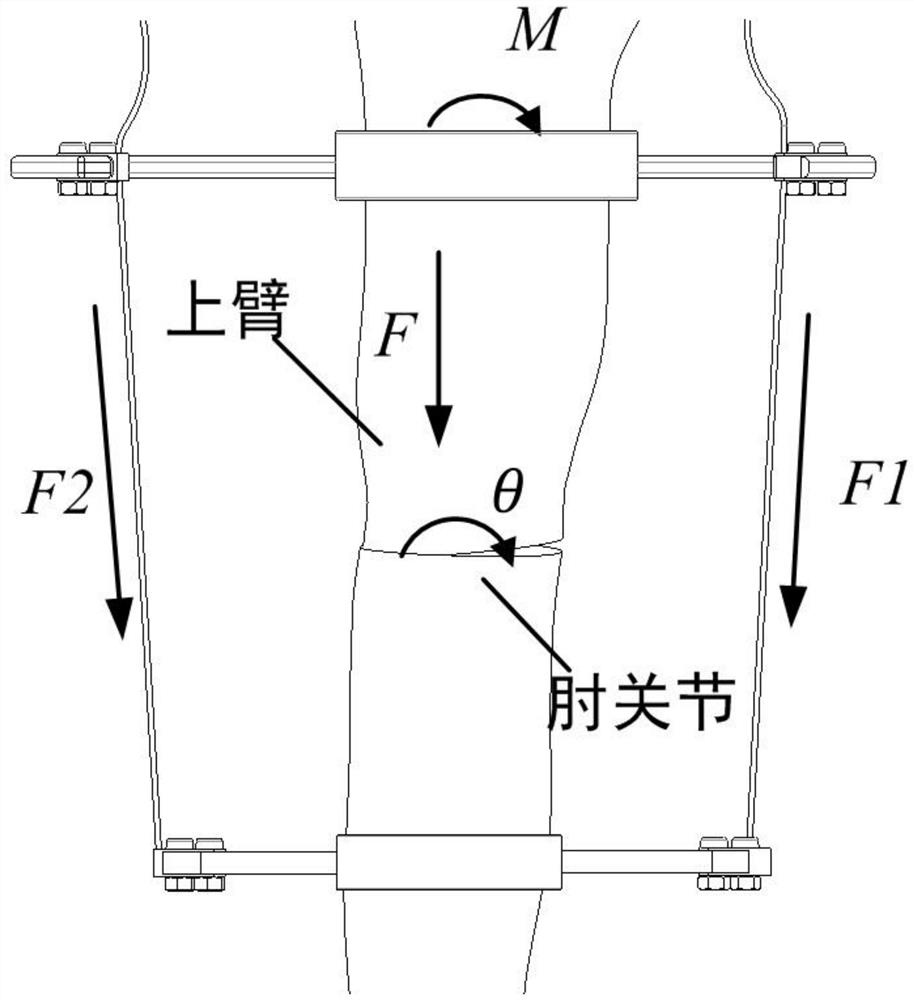
[0064] In the existing technology, such as Figure 4 As shown, if an exoskeleton link is added between the arm and the drive ring, there will be a problem that the rotation ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com