Self-driving automobile transverse motion self-adaptive parameter control method
An adaptive parameter, lateral motion technology, applied in non-electric variable control, vehicle position/route/height control, control devices, etc., can solve the problems of sacrificing the response time of automatic driving control, affecting the speed of matrix solution, wasting time, etc. Achieve the effect of strong control output continuity, improve solution speed, and avoid time waste.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0101] A kind of self-driving car lateral motion adaptive parameter control method of the present invention described in this embodiment comprises the following steps:
[0102] (1) Obtain vehicle motion parameters and establish a two-degree-of-freedom vehicle dynamics model;
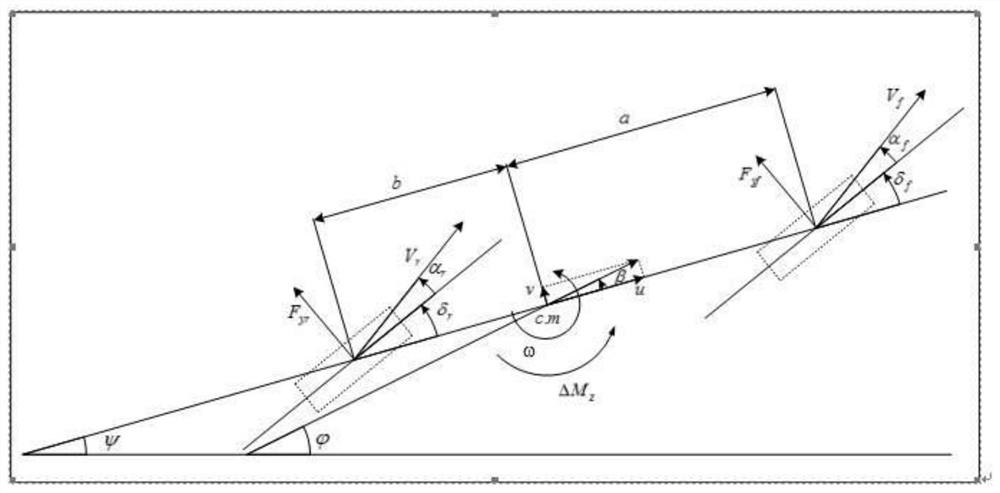
[0103] Such as figure 1 As shown, the establishment of a two-degree-of-freedom vehicle dynamics model includes:
[0104] The lateral acceleration of the vehicle is a y , subject to the acceleration along the lateral direction of the vehicle and the vehicle centripetal acceleration a f influence, of which v x represents the longitudinal speed of the vehicle, Indicates the yaw angular velocity of the vehicle, then the expression of the lateral acceleration is:
[0105]
[0106] According to Newton's second law, there are:
[0107] m·a y =F yf +F yr
[0108] where m is the mass of the vehicle, F yf , F yr are the lateral forces of the front and rear tires of the vehicle, respectively;
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com