


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Mechanical arm visual control method and device
A technology of a control device and a robotic arm, which is applied in the field of robotic arms, can solve the problems of inability to stably adsorb materials, cluttered and inclined materials, and affecting work efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
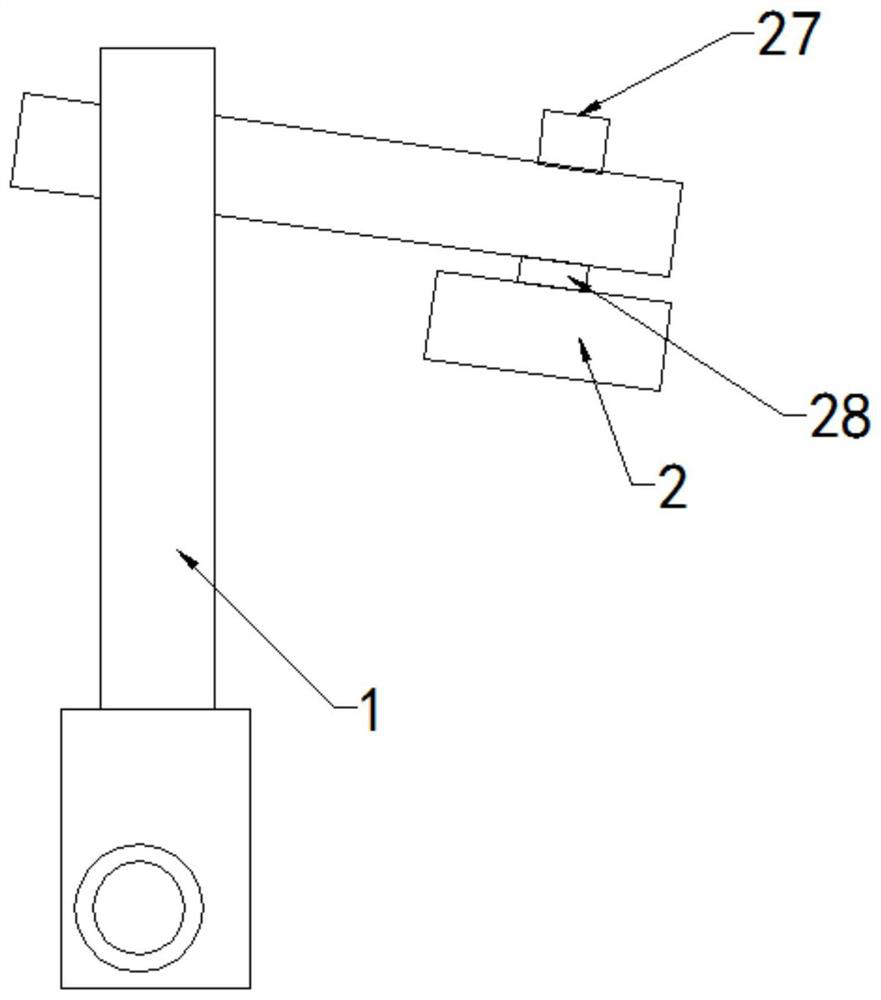
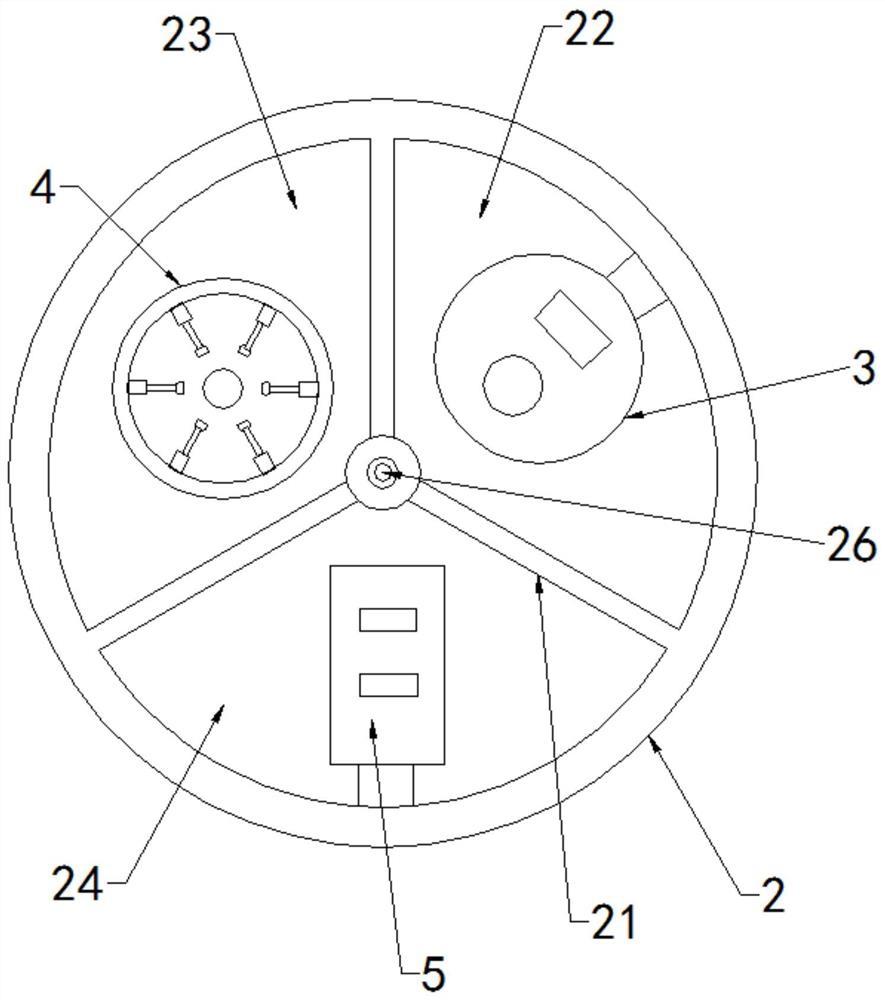
[0039] Such as Figure 1 to Figure 7 As shown, the present invention discloses a visual control device for a robotic arm. In a specific embodiment of the present invention, it includes a robotic arm main body 1 that can be rotated and adjusted. The bottom end of the robotic arm main body 1 It can be equipped with a signal output interface, and the signal output interface can be connected with the main control computer and external power supply of the mechanical arm through wires; the end of the main body 1 of the mechanical arm is equipped with an installation tube 2 with an installation cavity; In the installation cylinder 2 and separate the installation cavity of the installation cylinder 2 to form a first cavity 22, a second cavity 23 and a third cavity 24, the first cavity 22, the second cavity 23 and the third cavity The bodies 24 are all set into fan-shaped cavities; the mounting base 25 is located at the center of the bottom of the mounting cylinder 2 and is located at ...
Embodiment 2
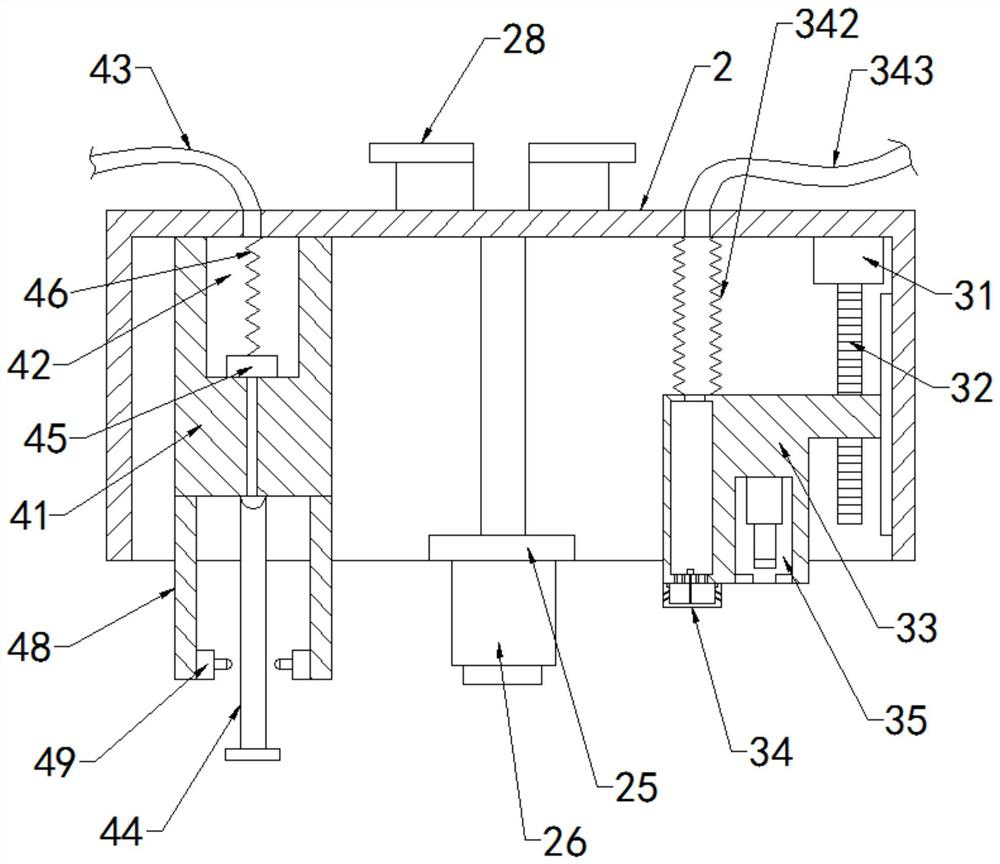
[0052] Such as Figure 6As shown, the difference between this embodiment and Embodiment 1 is that: in this embodiment, a toggle groove 35 is provided at the bottom of the first lifting seat 33, and a second dial is arranged in the toggle groove 35. The second toggle unit includes a first electric push rod 36, which is installed in the toggle groove 35; a toggle block 37, which is installed on the bottom output end of the first electric push rod 36, is received by the first electric push rod. The rod 36 controls the up and down movement; the limit ring 38 is arranged on the notch of the toggle groove 35, and the inner diameter of the annular structure matches the diameter of the toggle block 37; the toggle block 37 is set as an adsorption iron core, The toggle block 37 is externally connected with an electromagnetic control device for controlling the magnetic on-off of the adsorption iron core.
[0053] Through the above technical solution, when it is difficult to move parts t...
Embodiment 3
[0055] The invention also discloses a method for visual control of a robotic arm. In a specific embodiment of the invention, the method includes the following steps:
[0056] S1 Installation before use: Install the robotic arm on the workbench, adjust the position and angle of the robotic arm so that the visual sensor is aligned with the placement position of the part; debug based on the main control computer of the robotic arm to ensure that the visual sensor can collect the image of the part Send it to the vision processor to ensure that the target can be recognized and classified, calculate the two-dimensional coordinate position of the part target, debug the vertical height of the captured part, and complete the debugging to prepare for the grasping work;
[0057] S2 Adsorption and grabbing: After the first grabbing mechanism is aligned with the parts, the suction device is used to suck air through the suction pipe, and the gas in the suction chamber is sucked to form a neg...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com