Image registration method and device based on point cloud data
A point cloud data and image registration technology, which is applied in the field of image processing, can solve the problems of low matching efficiency, low accuracy of coarse registration results, and increase the probability of wrong matching of fine registration, so as to achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
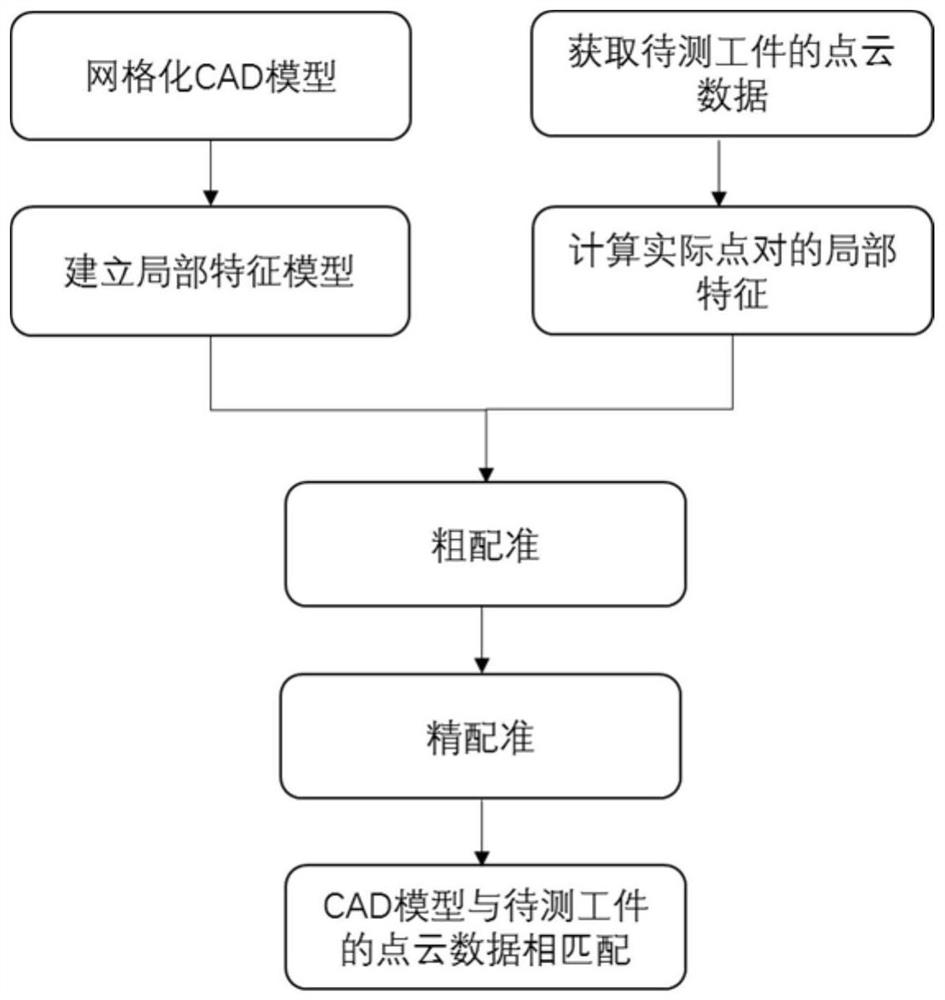
[0060] In the process of surface defect detection, image registration method is usually used to match the CAD standard model of the workpiece to be tested with the point cloud data of the workpiece to be tested in real time, and then to detect whether the workpiece to be tested has defects. An image registration method based on point cloud data provided by this application can provide a good initial transformation matrix and improve the registration accuracy and convergence speed of traditional algorithm point clouds.
[0061] A kind of image registration method based on point cloud data of the present application, specifically comprises the following steps:
[0062] S1. Grid the CAD model into a triangular surface model, and the CAD model is a standard model of the workpiece to be tested. The meshing of the CAD model includes but not limited to the method of delaunay triangular meshing.
[0063] S2. Calculate the local features and spatial positions of all model point pairs ...
Embodiment 2
[0094] In this embodiment, an image registration device based on point cloud data includes:
[0095] A meshing module, which is used to mesh the CAD model into a triangular patch model, and the CAD model is a standard model of the workpiece to be measured;
[0096] The first calculation module is used to calculate local features and spatial positions of all model point pairs in the triangular patch model, and establishes a local feature model, where the model point pairs are composed of any two model points in the triangular patch model;
[0097] The acquisition module acquires the point cloud data of the workpiece to be measured, and the point cloud data is obtained by sampling the surface of the workpiece to be measured using a three-dimensional scanning device;
[0098] The second calculation module is used to calculate the local features of actual point pairs in the point cloud data, wherein the points in the point cloud data are composed of actual points and reference poi...
Embodiment 3
[0108] This embodiment provides a computer device, including:
[0109] one or more processors;
[0110] memory for storing one or more programs,
[0111] When one or more programs are executed by one or more processors, the one or more processors realize the above-mentioned image registration method based on point cloud data.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com