Crawler analysis method for outer edge of plane image object
An analysis method and outer edge technology, applied in the direction of instruments, character and pattern recognition, and other database indexes, can solve problems such as failure to locate, error in the hollow area of an object, failure to obtain the tangent direction relationship of adjacent edge points, etc. To achieve the effect of reducing redundant data
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
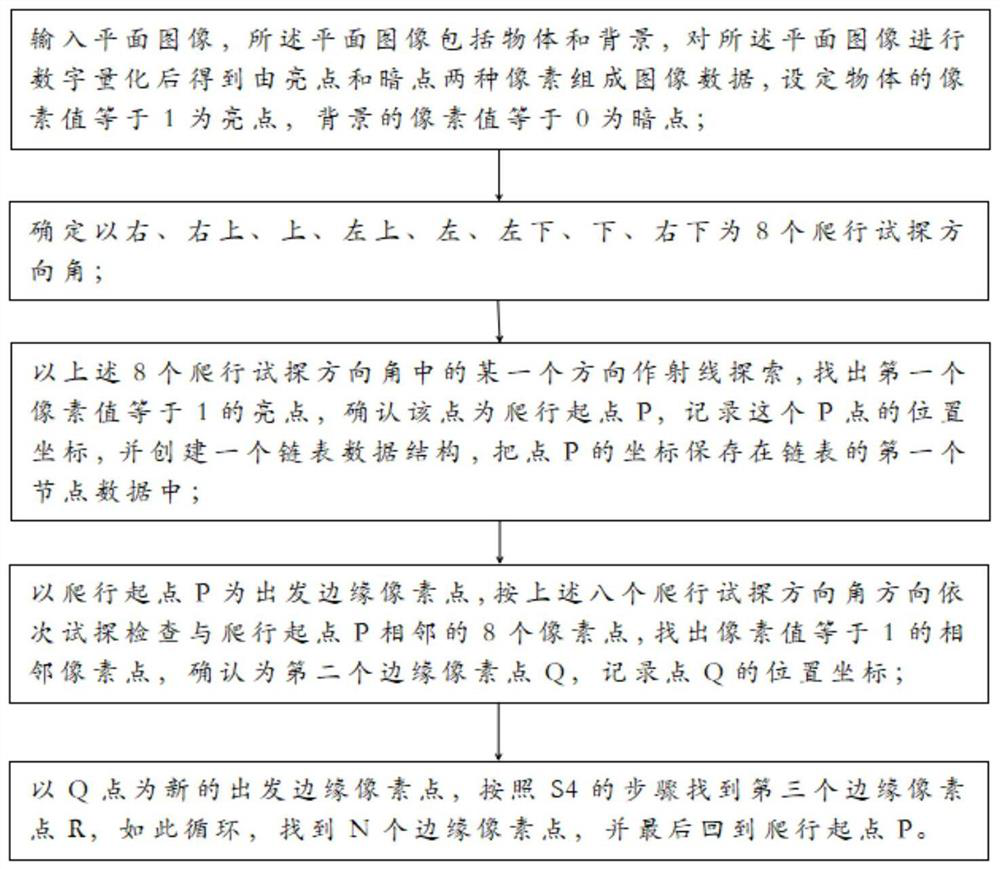
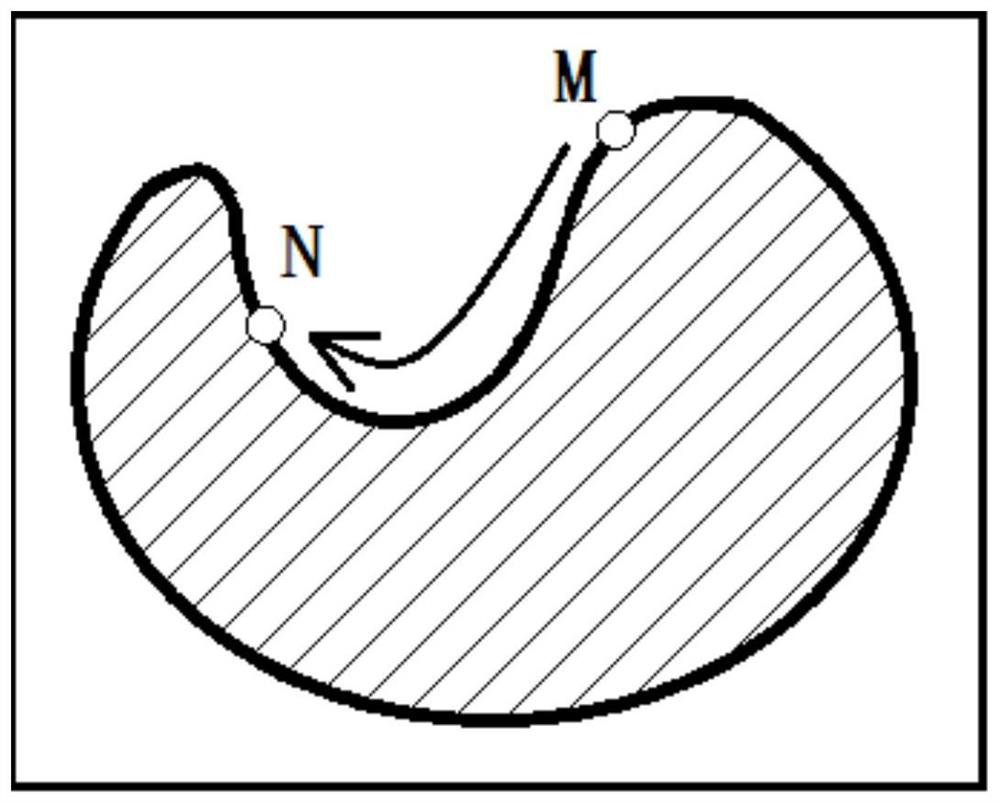
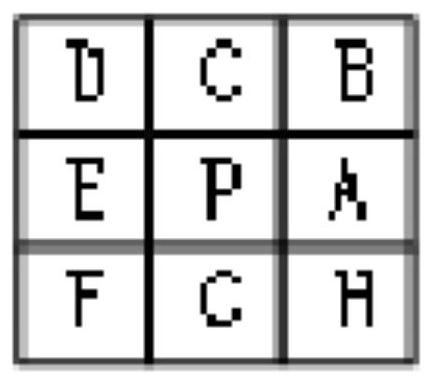
[0032] Such as Figure 1 to Figure 3 As shown, the crawler analysis method for the outer edge of the plane image object of the present embodiment includes the following steps:
[0033] S1, input plane image, described plane image comprises object and background, after digital quantization is carried out to described plane image, obtain the image data that is made up of two kinds of pixels of bright spot and dark spot, set the pixel value of object equal to 1 to be bright spot, background's A pixel value equal to 0 is a dark point;
[0034] S2. Determine the right, upper right, upper, upper left, left, lower left, lower, and lower right as the 8 crawling test direction angles, and stipulate that the arrangement order of these 8 crawling test direction angles is the test rotation sequence
[0035] Define the actual direction of crawling, which refers to the direction of crawling from one pixel on the edge of the object to the subsequent edge pixels. There are two cases: clockwi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com