Mine autonomous three-dimensional surveying and mapping unmanned vehicle and surveying and mapping method
A mining and three-dimensional technology, which is applied in the field of independent three-dimensional surveying and mapping unmanned vehicles and surveying and mapping in mines, which can solve problems such as high professional quality requirements, high work intensity, and insufficient intuitive data
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
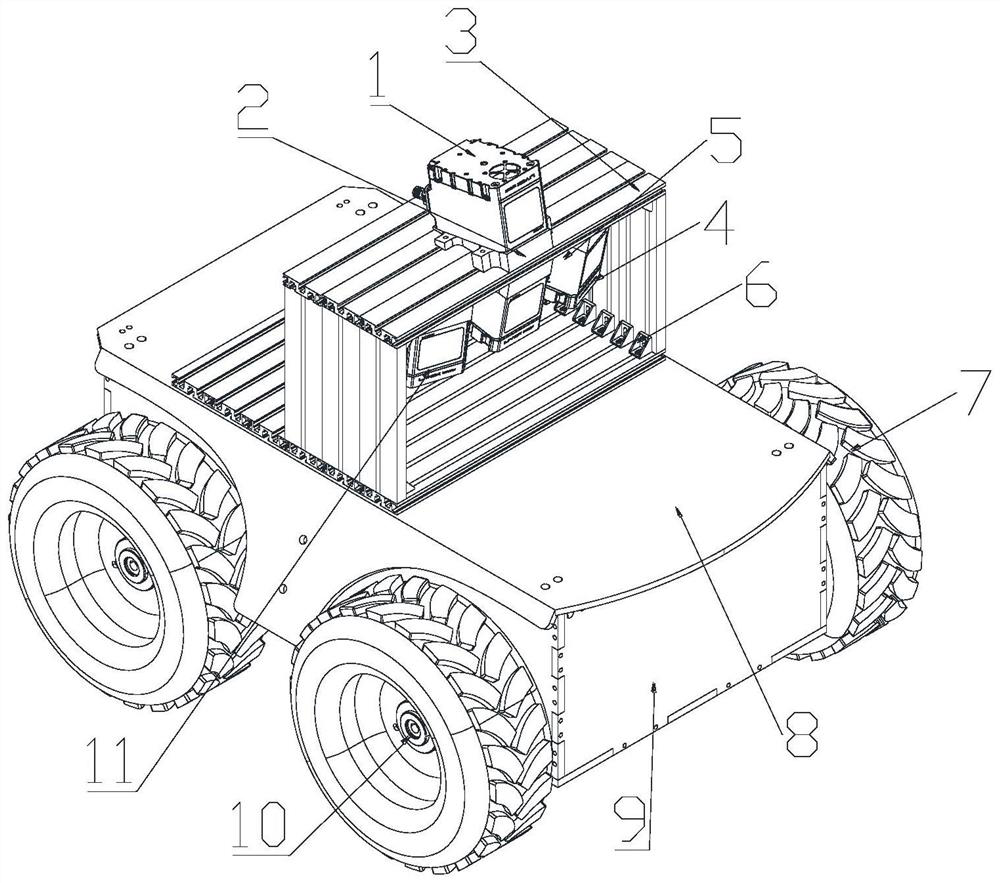
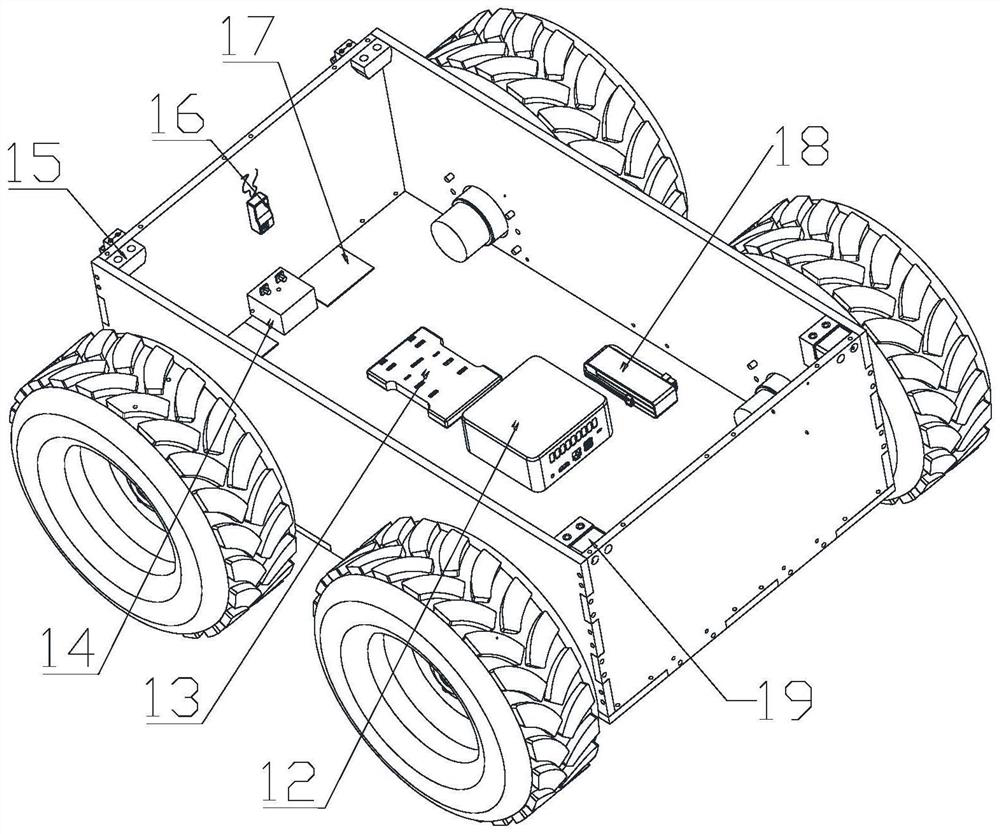
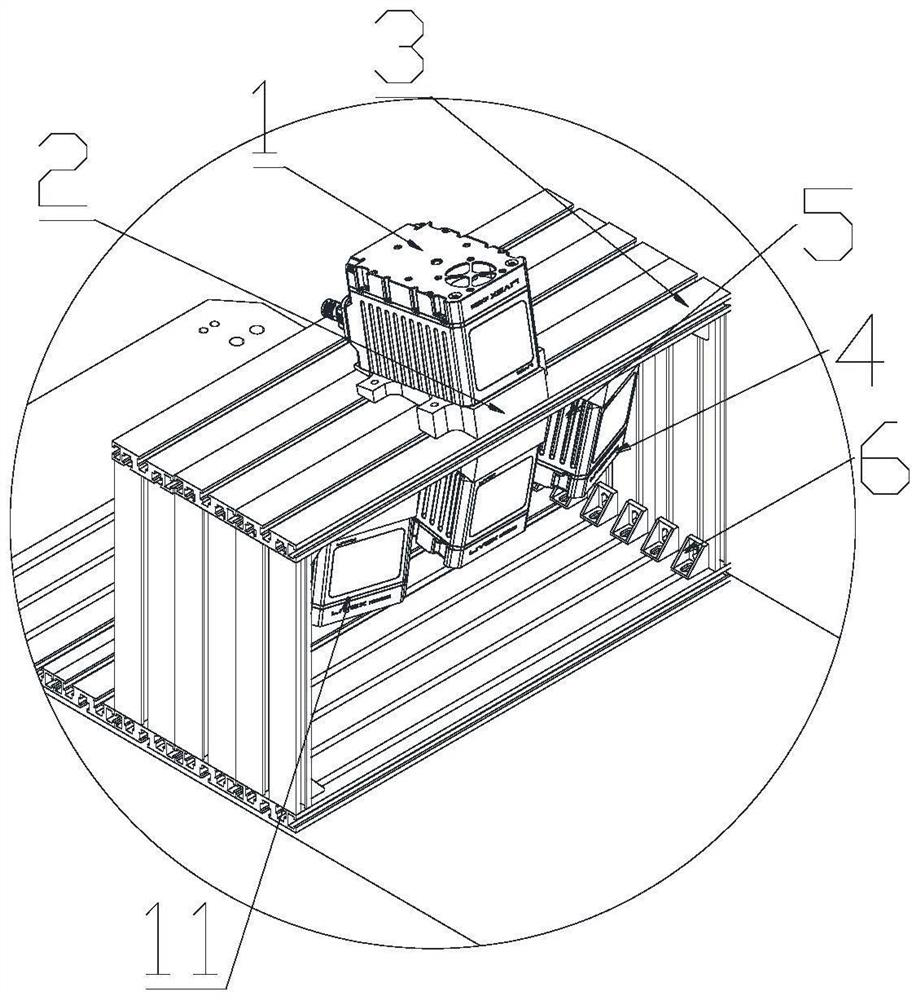
[0052] see Figure 1 to Figure 5 , the present embodiment provides an autonomous three-dimensional surveying and mapping unmanned vehicle for mines, including a vehicle body, an aluminum profile bracket 3, a laser radar, and a moving mechanism. Part 15, remote control receiver 16, drive plate 17, lithium battery 18 and front fastener 19, described vehicle body front portion is provided with front fender 9, and described vehicle body rear portion is provided with tailgate, and described micro host 12 and The controller 13 is fixed inside the vehicle body, and a communication line is provided to connect the two. The switching power supply 14 is installed at the rear of the vehicle body, and an Allen wrench is provided to turn on or off the power supply. The remote control receiver 16 is fixed on the Rear part, receive remote control signal, described driving board 17 is close to switching power supply 14, and described lithium battery 18 is used for power supply, is installed in...
Embodiment 2
[0066] Please refer to Figure 6 , this embodiment provides an autonomous three-dimensional surveying and mapping method for mines based on the UAV in the first embodiment above, including:
[0067] When the drone is traveling in the mine, all the laser radars on it collect the point cloud data of the current environment in real time, and send the corresponding point cloud data to the host frame by frame;
[0068] After the host receives the point cloud data of the current frame, it screens out high-value data points;
[0069] Preferably, the host will filter out point cloud data close to the edge of the FOV field of view, point cloud data with too large or too small intensity, and incident angles close to π or 0 point cloud data and point cloud data hidden behind objects to obtain high-value data points.
[0070] Then, the host calculates the local smoothness of the high-value data points, extracts plane feature points and edge feature points respectively, and obtains a pla...
Embodiment 3
[0090] This embodiment provides a method for completing autonomous mine surveying and mapping based on the UAV provided in Embodiment 1 or Embodiment 2. The method may specifically include the following steps:
[0091] Step 1: Collect the point cloud data in the current working environment in real time through the top lidar 1, the left-facing lidar 4, the bottom-facing lidar 5, and the right-facing lidar 11 on the drone, and collect each collected One frame of point cloud data is transmitted to the NUC micro-host 12 to execute the SLAM algorithm in real time.
[0092] Specifically, after the NUC micro-host 12 receives a frame of point cloud data, the process of executing the SLAM algorithm includes:
[0093] Step 11: Filter out high-value data points by calculating the features of the lidar point cloud P=[x, y, z] in the Front-Left-Up (FLU) coordinate system;
[0094] Specifically, filter according to the result of calculating each point cloud data according to the following ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com