Variable-posture joint type dexterous hand
A articulated, dexterous hand technology, applied in the field of manipulators, can solve problems such as single grasping structure and inability to complete grasping tasks, and achieve the effect of convenient grasping
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
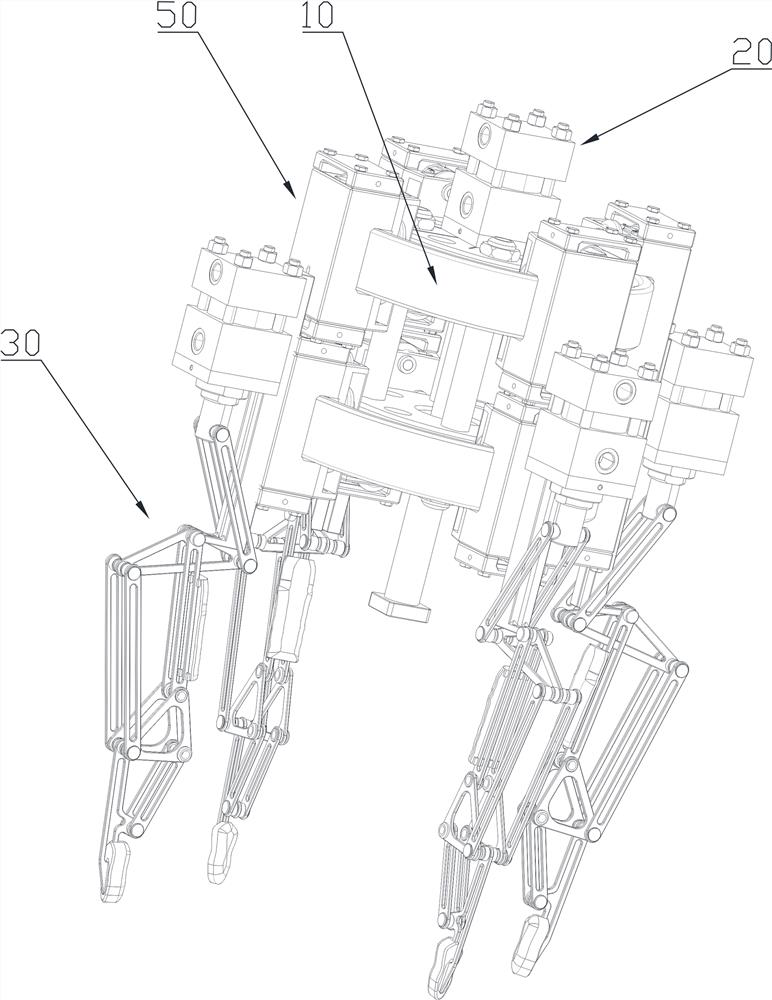
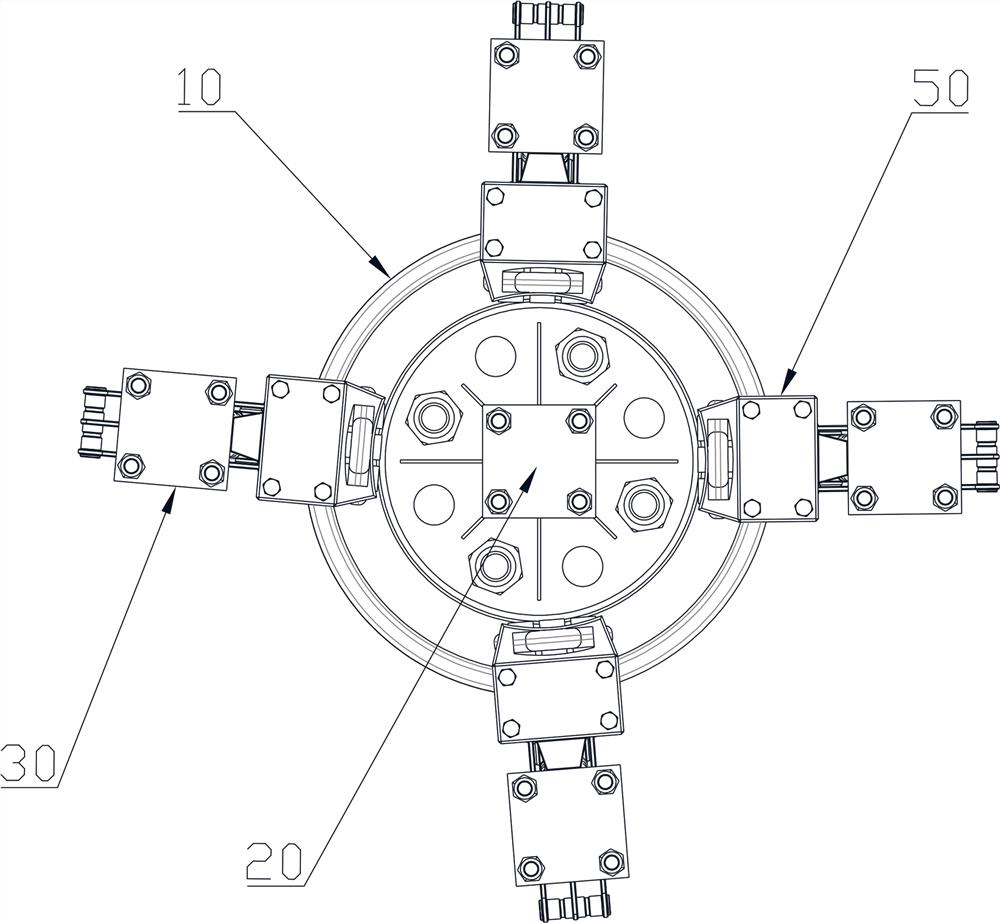
[0040] refer to figure 1 , a posture-changing joint-type dexterous hand, comprising: a base 10 and a clamping assembly 20 and a clamping assembly 30 respectively arranged on the base 10 .
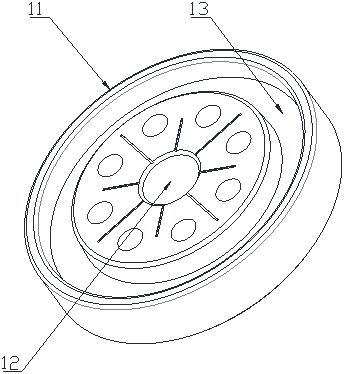
[0041] refer to figure 1 , figure 2 and image 3 , the base 10 includes: two connected discs 11, the center positions of the two discs 11 are respectively provided with corresponding sliding holes 12, and the clamping assembly 20 is penetrated and arranged in the sliding holes 12, so that when grabbing objects Jacking the top surface of the object. A fixing hole is also provided on the outer side of the sliding hole 12 , and the connecting piece passes through the fixing hole so as to connect and fix the two discs 11 . The top and bottom surfaces of the two disks 11 are respectively provided with annular rolling grooves 13, on which the sliding assembly 50 is fitted, the clamping assembly 30 is connected to the sliding assembly 50, and the sliding assembly 50 moves along the circular r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com