Intelligent robot chassis equipment for avoiding accidental collision by means of touch rods
A technology of intelligent robot and touch bar, which is applied in the direction of manipulators and manufacturing tools, can solve the problems of robot collision, gap between the bottom end and the control end, affecting the control accuracy of the electronic control end, etc., and achieve the effect of ensuring normal operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
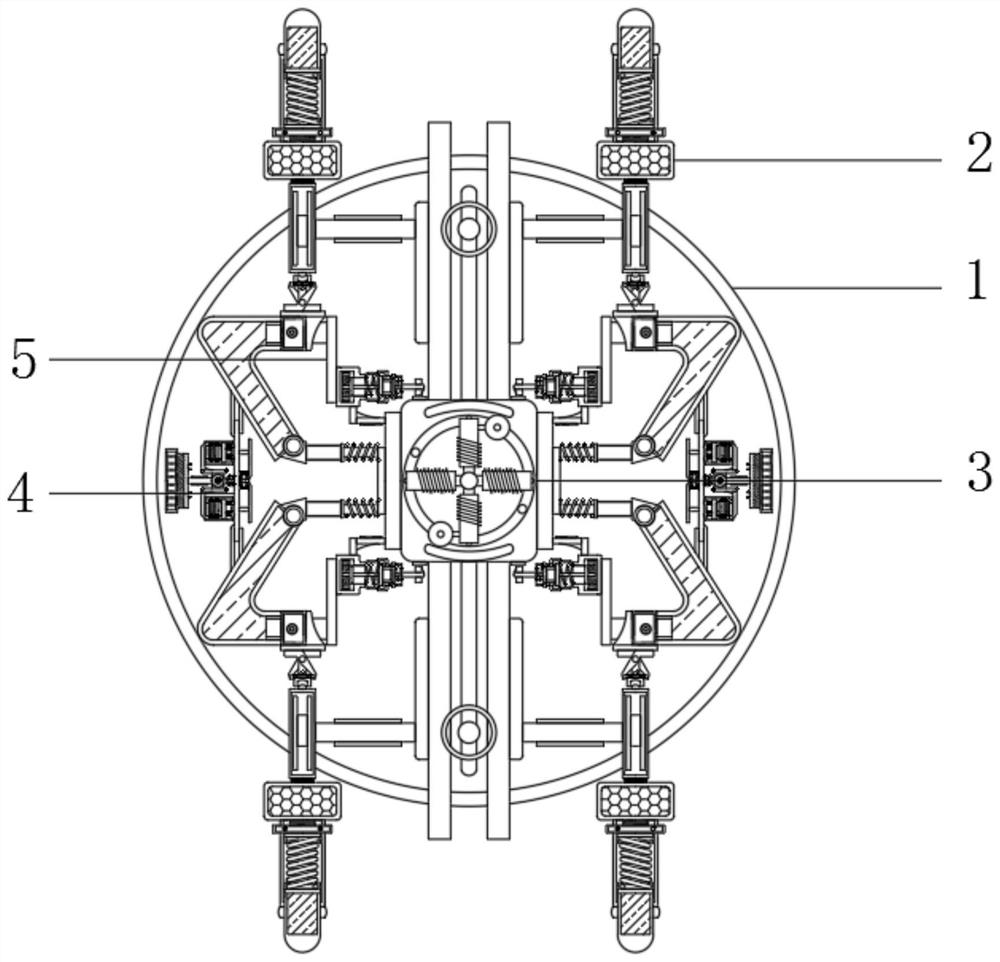
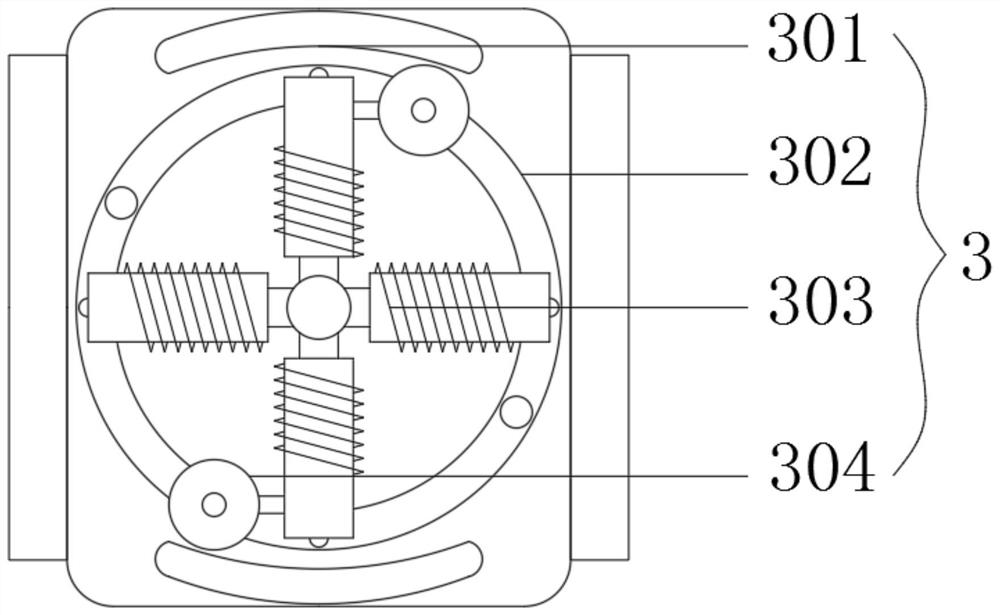
[0022] see Figure 1-5 , an intelligent robot chassis device that uses a touch bar to avoid accidental collisions, including a robot chassis device 1, the robot chassis device 1 includes a center adjustment frame 3, and a movable runner 302 is movably connected to the center of the inner side of the center adjustment frame 3, The left and right sides of movable runner 302 are all movably connected with linkage curved rod frame 5, and the left and right sides of linkage curved rod frame 5 are all movably connected with curved rod 501, and the outer side of curved rod 501 is movably connected with ventilator frame 4, and the movable turning The upper and lower sides of the wheel 302 are movably connected with a touch bar frame 2 .
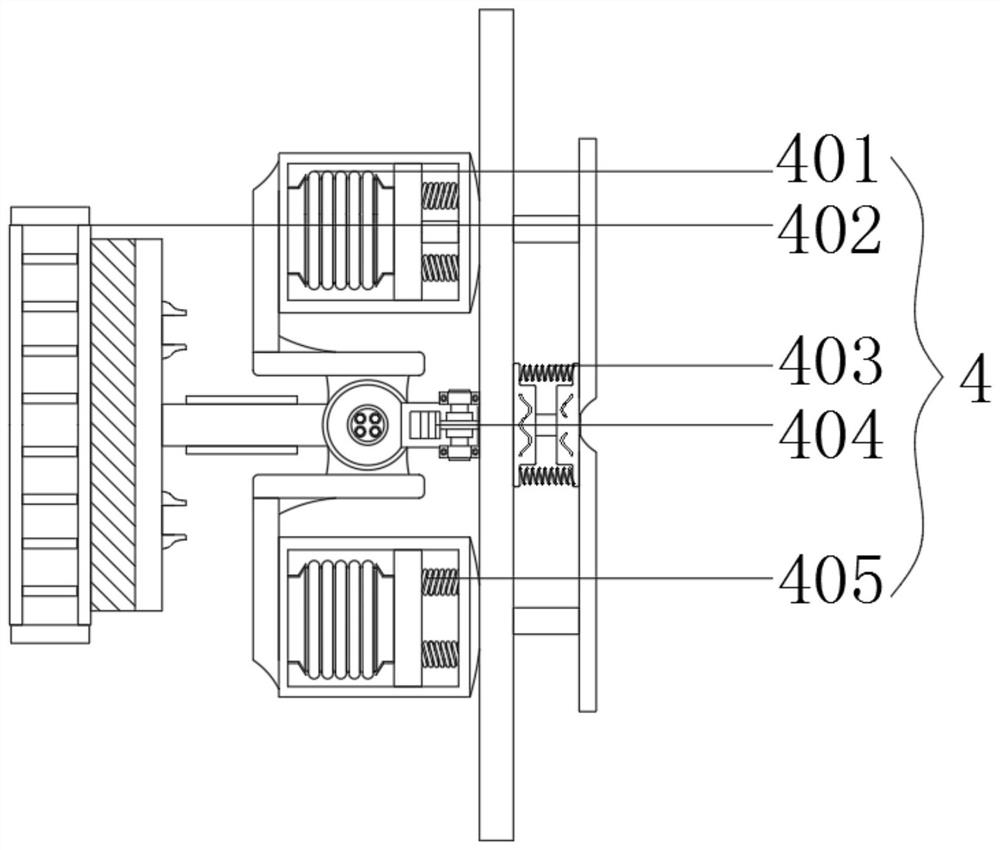
[0023] Further, the ventilation frame 4 includes a ventilation tube 402, the upper and lower sides of the ventilation tube 402 are movably connected with a rubber spring rod 401, the outer side of the rubber spring rod 401 is movably connected with a...
Embodiment 2
[0027] see figure 1 with Figure 5 , an intelligent robot chassis device that uses a touch bar to avoid accidental collisions, including a robot chassis device 1, the robot chassis device 1 includes a center adjustment frame 3, and a movable runner 302 is movably connected to the center of the inner side of the center adjustment frame 3, The left and right sides of movable runner 302 are all movably connected with linkage curved rod frame 5, and the left and right sides of linkage curved rod frame 5 are all movably connected with curved rod 501, and the outer side of curved rod 501 is movably connected with ventilator frame 4, and the movable turning The upper and lower sides of the wheel 302 are movably connected with a touch bar frame 2 .
[0028] Further, the touch bar frame 2 includes a touch bar 201, the bottom end of the touch bar 201 is movably connected with a torsion spring 202, and the bottom end of the torsion spring 202 is movably connected with a telescopic slide...
Embodiment 3
[0032] see figure 1 with figure 2 , an intelligent robot chassis device that uses a touch bar to avoid accidental collisions, including a robot chassis device 1, the robot chassis device 1 includes a center adjustment frame 3, and a movable runner 302 is movably connected to the center of the inner side of the center adjustment frame 3, The left and right sides of movable runner 302 are all movably connected with linkage curved rod frame 5, and the left and right sides of linkage curved rod frame 5 are all movably connected with curved rod 501, and the outer side of curved rod 501 is movably connected with ventilator frame 4, and the movable turning The upper and lower sides of the wheel 302 are movably connected with a touch bar frame 2 .
[0033] Further, the upper and lower sides of the central position adjustment frame 3 are movably connected with the touch rod frame 2, the left and right sides of the central position adjustment frame 3 are movably connected with the lin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com