Mobile robot fusion path planning method for urban environment
A mobile robot, path planning technology, applied in instruments, motor vehicles, non-electric variable control, etc., can solve problems such as inability to guarantee paths, high computational complexity, and instability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be further explained below in conjunction with the accompanying drawings.
[0035] A fusion path planning method for mobile robots in urban environments, including local path planning and global path planning. In the local path planning, the distance and orientation between the robot and the obstacle are taken as the key factors, and the DDPG algorithm is used to avoid the obstacle and move towards the target point. In the global path planning, the distance and azimuth between the robot and the target point and the distance and azimuth to obstacles are used, and the next action of the mobile robot is obtained through the calculation method of the artificial potential field method, so as to realize the path planning of the mobile robot.
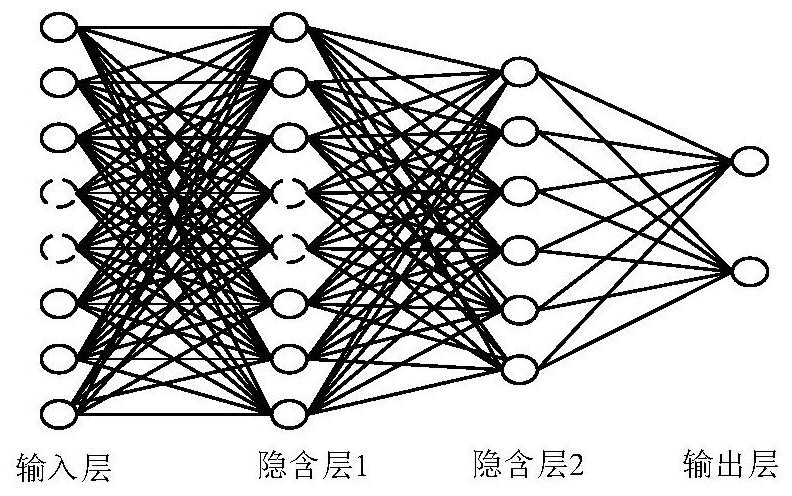
[0036] The strategy network of the present invention is composed of a four-layer neural network, and its network structure is as follows: figure 1 As shown, the input layer is the current state of the mobile ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com