Spatial positioning method and spatial positioning system for climbing robot
A space positioning and robot technology, which is applied in the direction of instruments, motor vehicles, manipulators, etc., can solve the problems of complex calculation process, multi-sensor, and inability to solve the positioning of wall-climbing robots stably and effectively, so as to simplify the positioning method, improve the positioning accuracy, The effect of stabilizing effective spatial positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
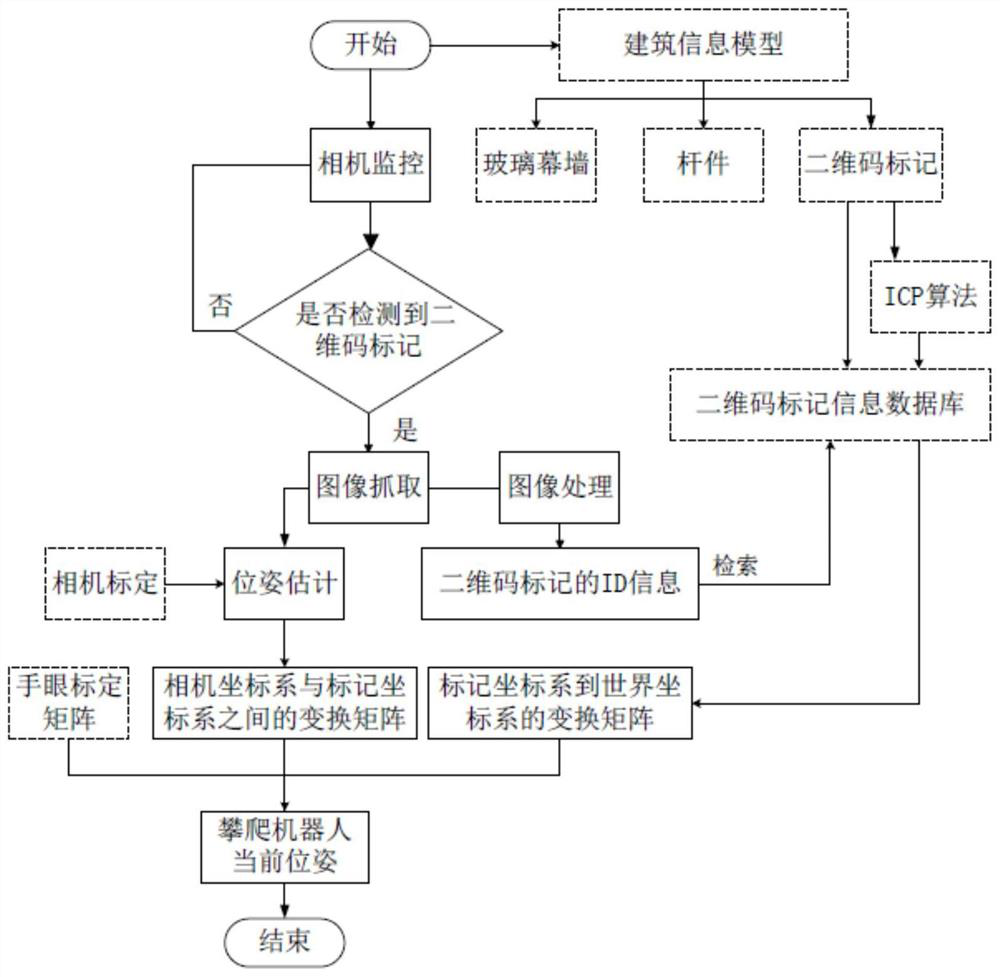
[0050] A space positioning method for a climbing robot. The climbing robot includes a robot body and a robot control system arranged on a computer. The robot body includes two sets of robot ends, and the robot ends are provided with adsorption modules for walking. A camera is fixedly installed, and the adsorption module and the camera are connected to the signal of the robot control system. The spatial positioning method includes the following steps:
[0051] S1: Perform information extraction and calculation based on the building information model to obtain a two-dimensional code mark information database; the building information model includes glass curtain walls (2), rods and several different two-dimensional code marks (1), the rods Connected between adjacent glass curtain walls (2), the two-dimensional code mark (1) is arranged on the glass curtain walls (2);
[0052] S2: collect image information through the camera, and transmit it to the robot control system through th...
Embodiment 2
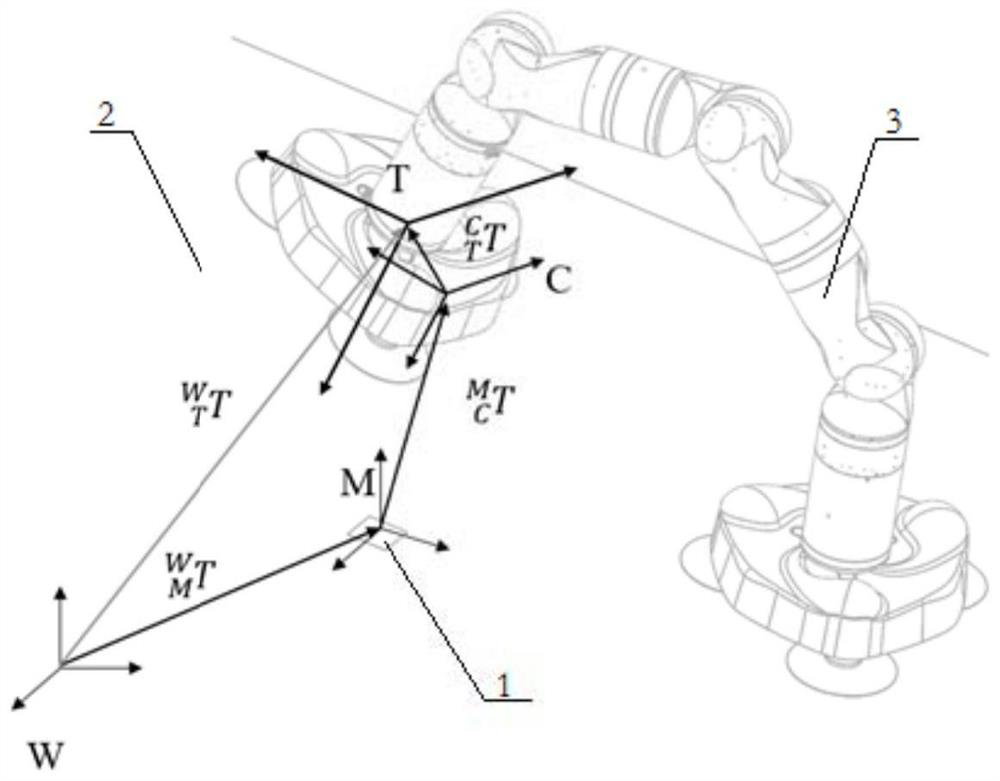
[0092] A spatial positioning system using the spatial positioning method of the climbing robot as described above, such as Figure 4 As shown, including climbing robot 3, computer and two-dimensional code mark 1, climbing robot 3 is provided with adsorption module, and adsorption module is provided with camera, image transmission module, data transmission module and sensor module, and computer is provided with robot control system and Adsorption module control system, the adsorption module control system is equipped with a two-dimensional code identification module and a two-dimensional code marking information database, the camera is connected to the image transmission module, the sensor module is connected to the data transmission module, and the image transmission module and the data transmission module are connected to the adsorption module The control system is connected, the two-dimensional code recognition module can recognize the two-dimensional code mark 1, and the two...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com