Robot control system synchronous with human body actions
A technology for controlling systems and human movements, applied in the direction of program-controlled manipulators, manipulators, manufacturing tools, etc., can solve the problems of reducing the patient's confidence in treatment, unable to care deeply for patients, etc., to improve life confidence, improve treatment confidence, and facilitate the operation of activities. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention.
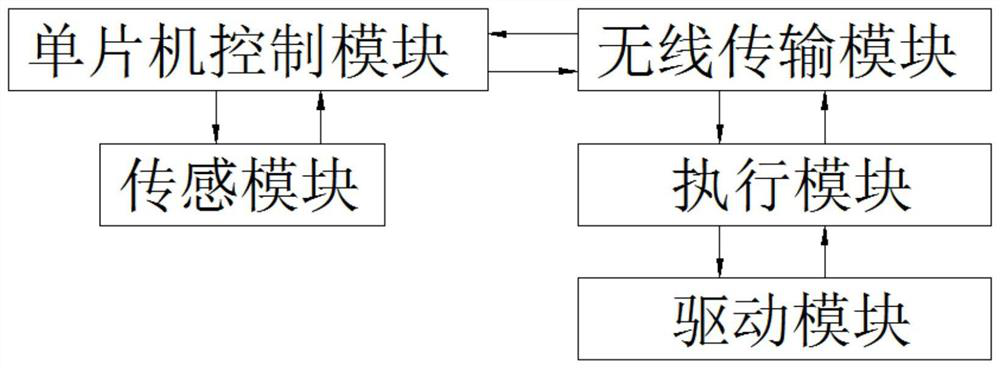
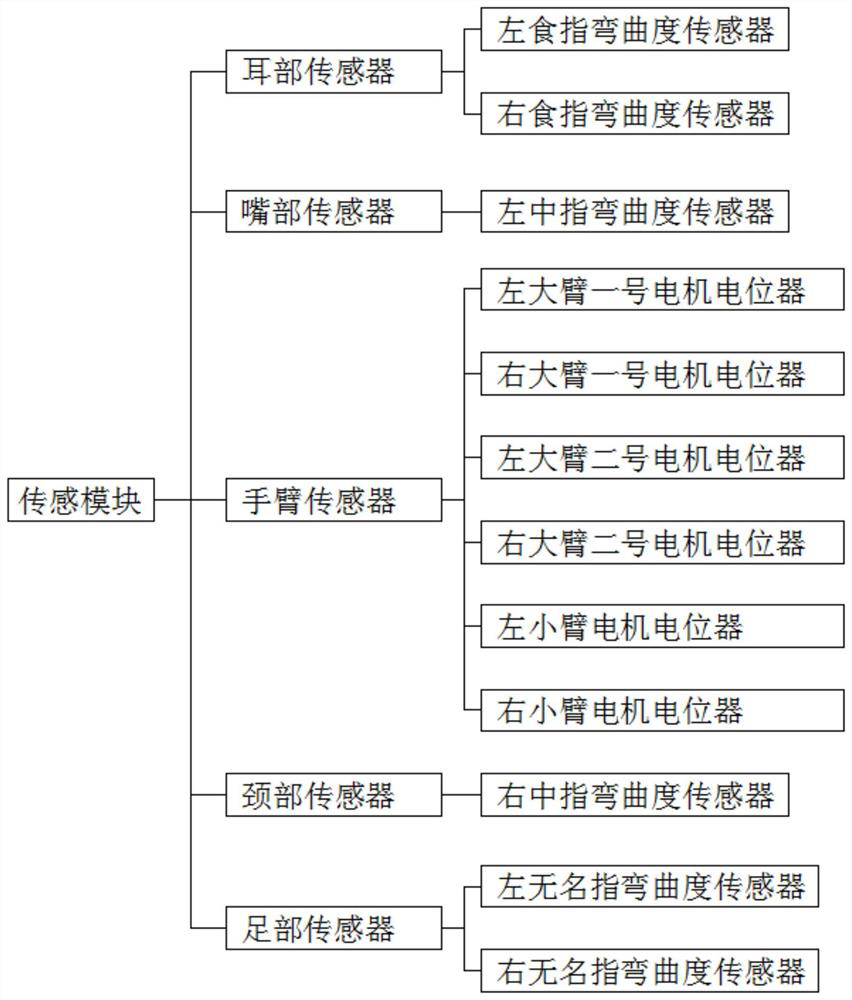
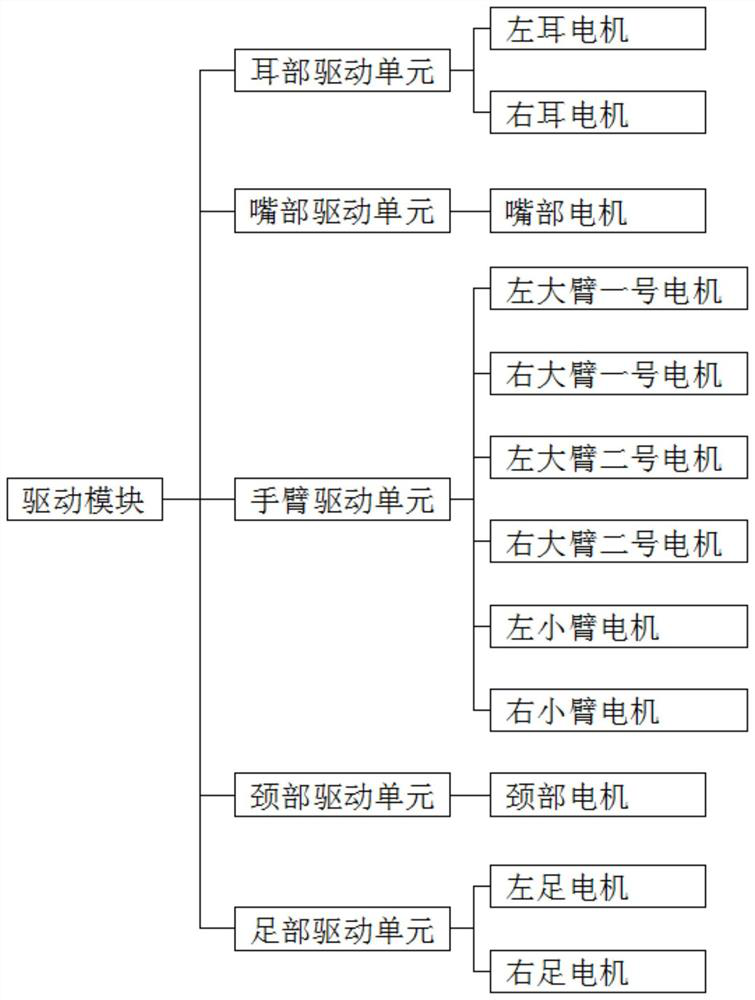
[0024] refer to Figure 1-5 , a robot control system synchronous with human body movements, comprising a single-chip microcomputer control module, the single-chip microcomputer control module is connected with a sensing module and a wireless transmission module, the wireless transmission module is connected with an execution module, and the execution module is connected with a drive module, The sensing module includes ear sensors, mouth sensors, arm sensors, neck sensors and foot sensors, and the drive module includes ear drive units, mouth drive units, arm drive units, neck drive units and foot drive units, The sensor module receives the action signal and transmits ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com