Unmanned aerial vehicle height setting algorithm based on multi-sensor fusion
A multi-sensor fusion and UAV technology, which is applied in the field of UAV altitude determination algorithm based on multi-sensor fusion, can solve the problems of absolute error, high barometric pressure measurement, and low accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
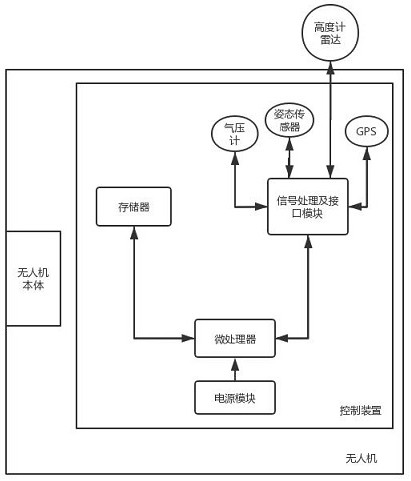
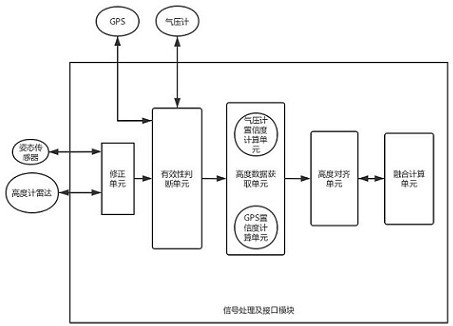
[0063] like figure 1 As shown, a drone based on multi-sensor fusion includes a drone body and a control device arranged in the drone body, the control device includes a microprocessor, and a power supply connected to the microprocessor, memory, a signal processing and interface module and a plurality of height sensors; the height measuring unit in the signal processing and interface module includes a validity judgment unit, a height data acquisition unit, a height alignment unit and a fusion calculation unit;
[0064] The plurality of sensors used to measure altitude include: altimeter radar, barometer and GPS altitude sensor, and the corresponding effective altitude includes radar altitude, barometric altitude and GPS altitude; Only by correcting can the accurate radar height be obtained;
[0065] The correction unit is connected with the altimeter radar and the attitude sensor to correct the measured radar height;
[0066] The validity judging unit is connected with each h...
Embodiment 2
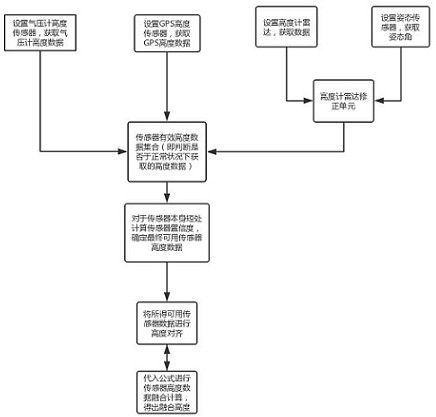
[0071] like Figure 2-3 As shown, a UAV altitude determination algorithm based on multi-sensor fusion includes a UAV body and a control device arranged in the UAV body, and the control device includes a plurality of sensors for measuring height.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com