Four-axis industrial robot for transferring irregular articles
An industrial robot and irregular technology, applied in the field of robots, can solve the problems of inconvenient picking of irregular items, irregular items of different shapes and sizes, and unsuitable for large-scale use, etc., to improve practicability and transfer. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] Next, the technical solutions in the embodiments of the present invention will be apparent from the embodiment of the present invention, and it is clearly described, and it is understood that the described embodiments are merely embodiments of the present invention, not all of the embodiments. Based on the embodiments of the present invention, there are all other embodiments obtained without making creative labor without making creative labor premises.
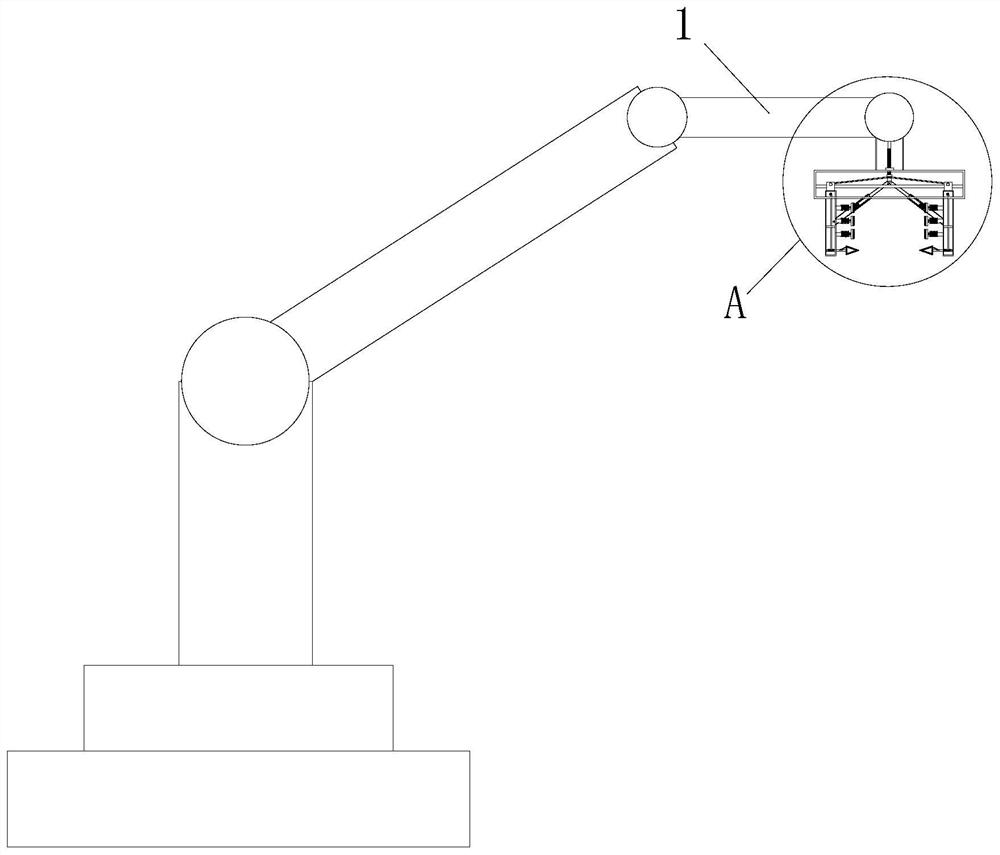
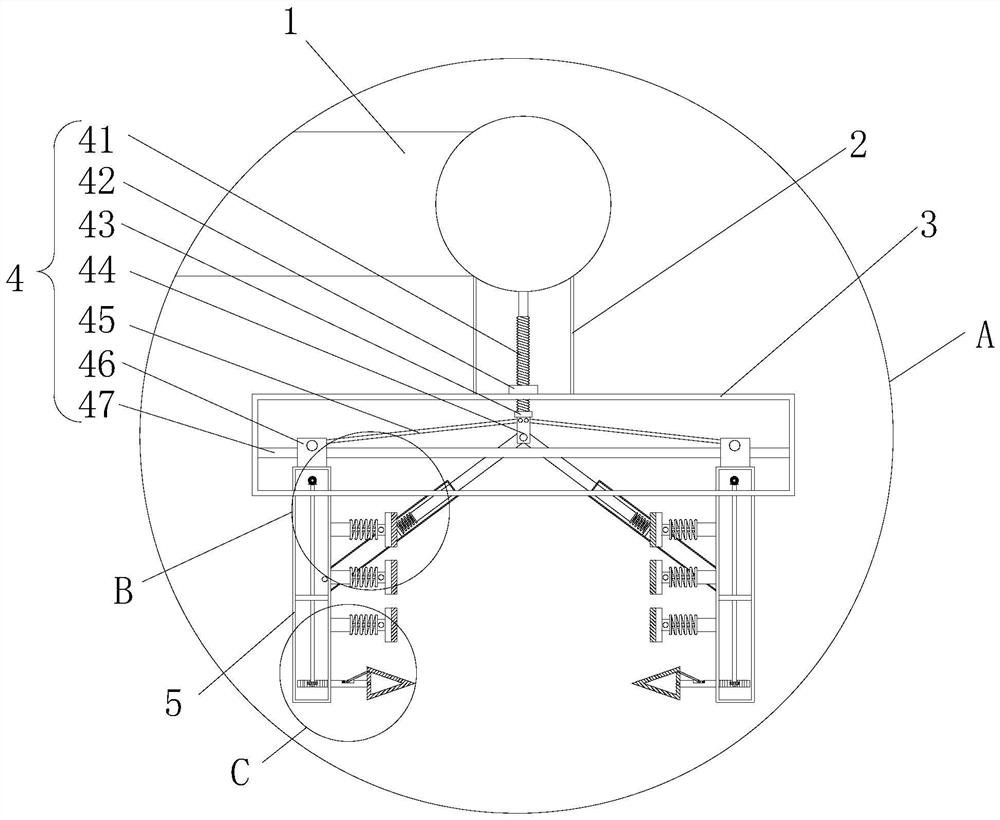
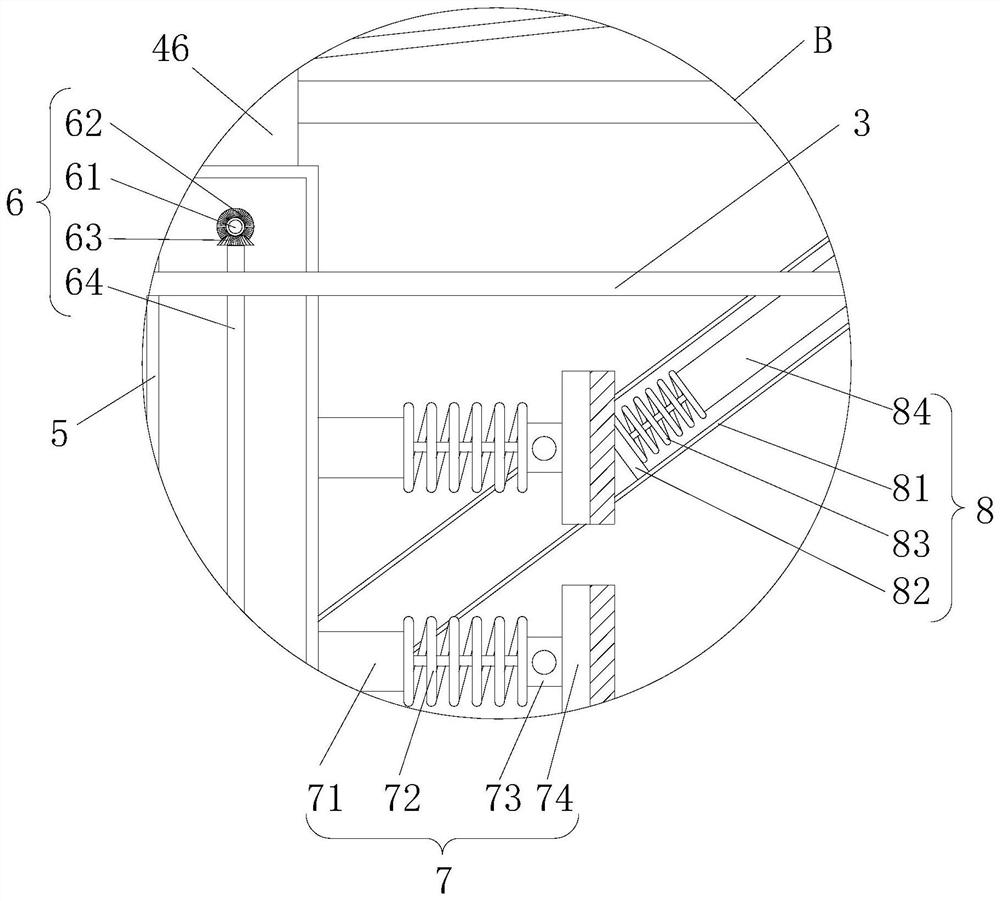
[0027] See Figure 1-4 The present invention provides a technical solution: a four-axis industrial robot 1 for transferring irregular articles, including four-axis industrial robot body 1, four-axis industrial robot body 1 rotating a connecting shaft 2, rotation shaft 2 and fixed The frame 3 is fixed, and the inner portion of the fixed frame 3 is provided with a clamping assembly 4 including a threaded rod 41, a nut 42, a bearing 43, a connecting rod 44, a support rod 45, a slider 46, and a slider 47. The nut 42 is fixed to ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com