


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Medical transportation robot based on fish swarm effect and self-adaptive cruise following method
A fish swarm effect and robot technology, applied in the field of medical robots, can solve the problems of affecting immunity, susceptible to infectious diseases, physical and psychological effects, etc., to achieve the effect of reducing human intervention, reducing accidental infection, and easy control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
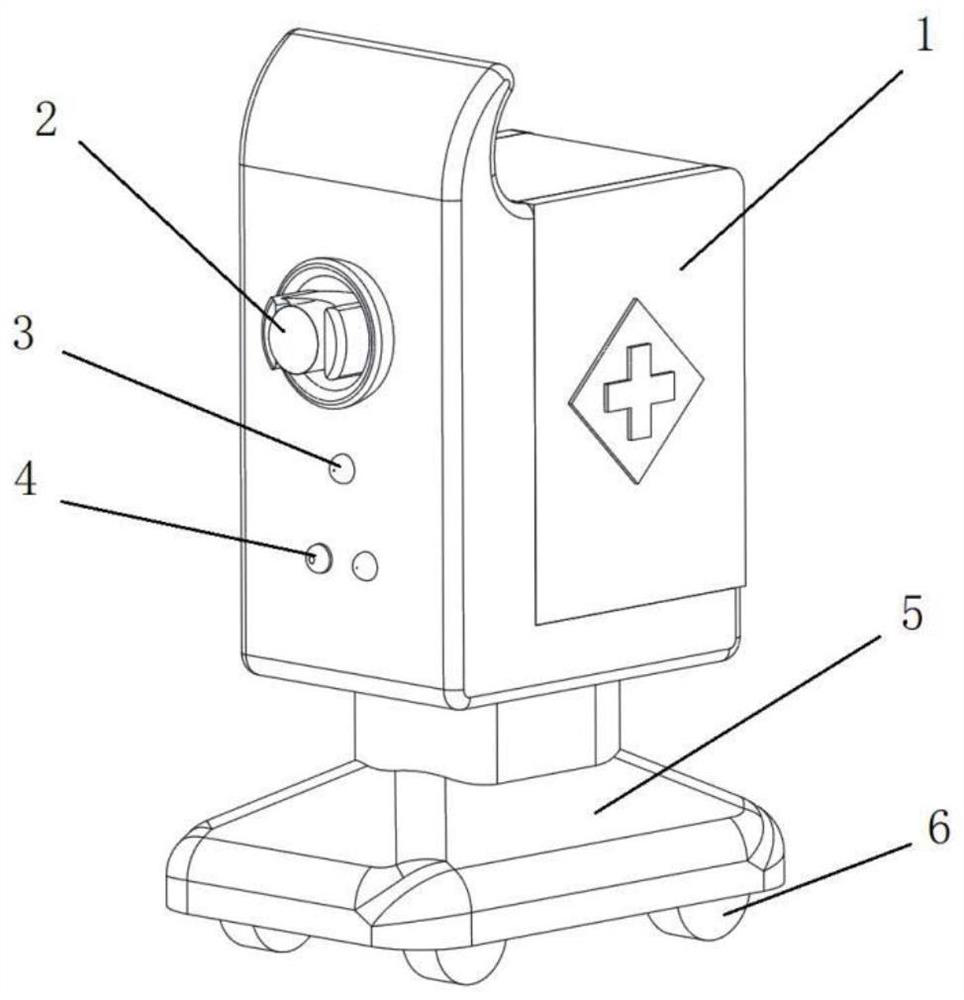
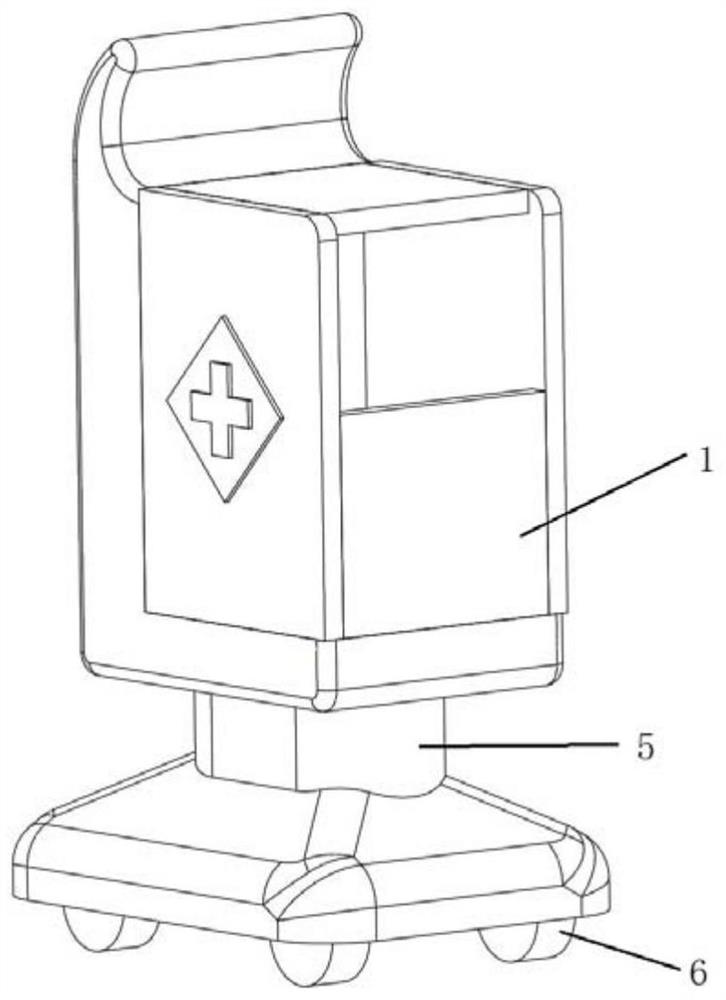
[0073] like figure 1 and 2 As shown, the present invention discloses a medical transport robot based on the fish swarm effect. The driving function of the medical transport robot is designed and completed, and in the case of multi-robot sharing lanes, the adaptive cruise of multi-robots is realized through the control algorithm. Or follow the driving, the medical transport robot includes a transport box 1, a camera 2, a laser radar sensor 3, an infrared obstacle avoidance sensor 4, a robot body 5 and several wheels 6, wherein:
[0074] The transport box 1 is arranged above the robot body 5 for placing medical supplies inside;
[0075] The inside of the robot body 5 is provided with a controller (not shown), a drive motor (not shown), a WLAN communication module (not shown) and a power supply module (not shown), wherein:
[0076] Described camera 2 is positioned at the front upper part of described robot body 5, is used for by carrying steering gear control, gathers the image...
Embodiment 2
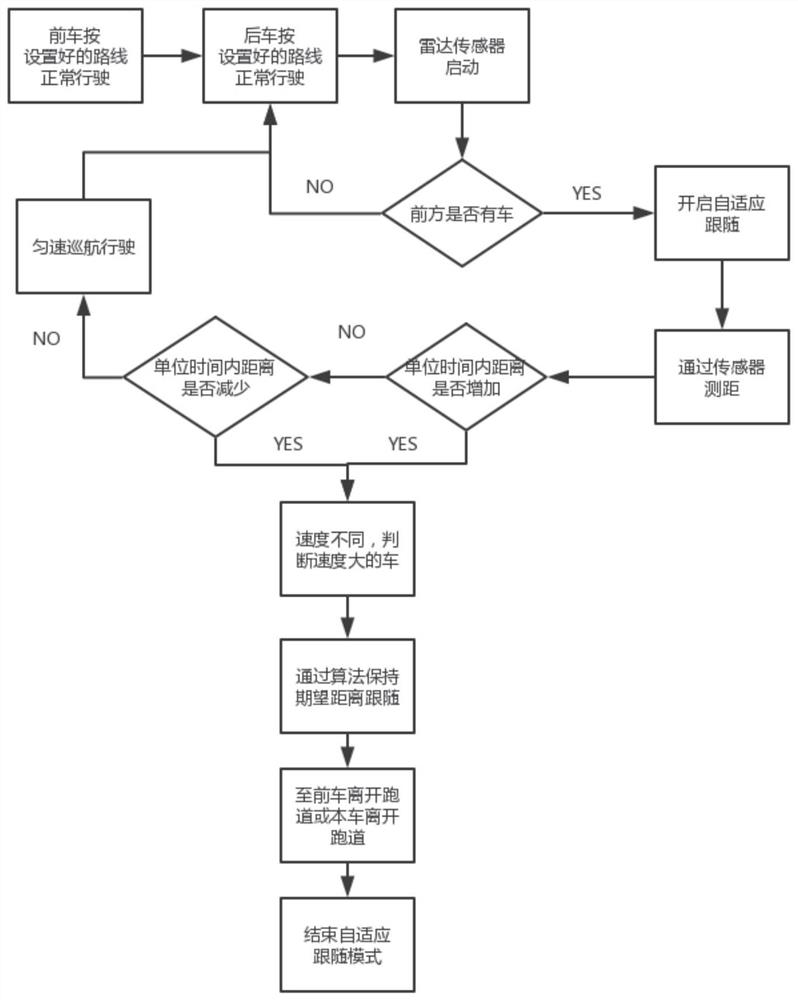
[0093] According to the foregoing embodiments, the design of a single medical transport robot is completed, such as image 3 As shown, on this basis, the present invention also discloses a fish swarm effect-based medical transport robot adaptive cruising and following method, using a plurality of the above-mentioned multifunctional medical transport robots to drive cooperatively, including the following steps:
[0094]Step 1: The sensor of the robot collects the current motion state of the robot in real time, including the speed and acceleration of the robot. If it senses that there is another robot in front, it will also collect the distance between the two;
[0095] Step 2: According to the current vehicle speed and the distance between the two, compare it with the distance between the two after a fixed time, you can get the comparison between the speed of the previous robot and the speed of the current robot;
[0096] Step 3: When adaptive cruising and following are require...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com