A fast finite-time controller design method for fully state-constrained manipulators
A technology with limited time and design method, applied in the direction of adaptive control, general control system, control/regulation system, etc., it can solve the problems of long control time, large tracking error, and inability to ensure that the system output accurately tracks the reference signal, etc. , to achieve the effect of ensuring accurate tracking control and ensuring stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
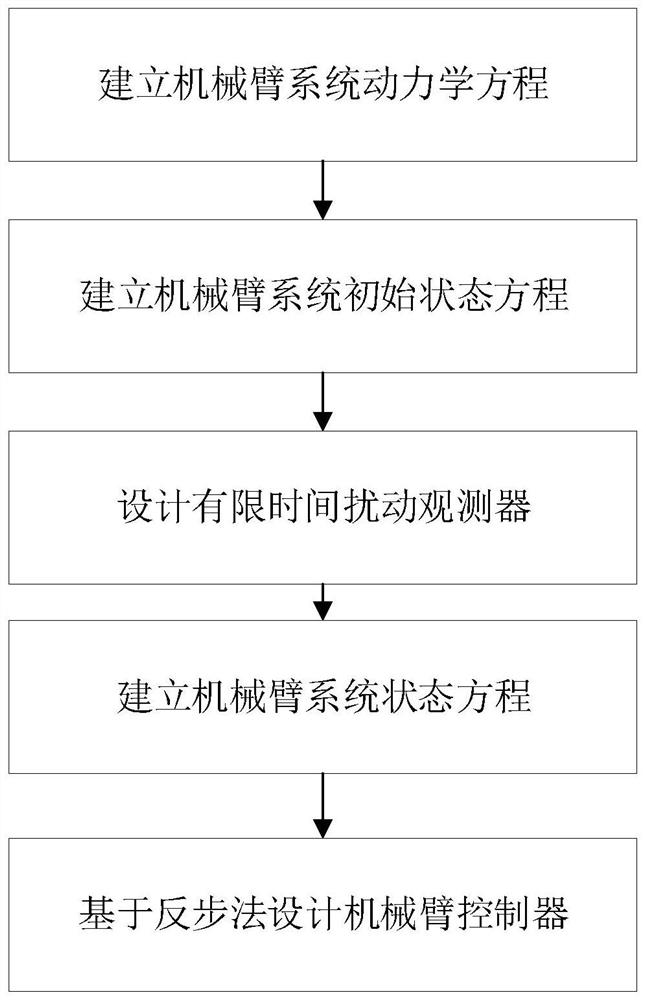
[0060] Please refer to figure 1 , Embodiment 1 of the present invention provides a design method for a fast finite-time controller of a full-state constraint manipulator, including the following steps:
[0061] Step S1, design an observer, specifically:
[0062] S1.1, establish the dynamic equation of the robotic arm system:
[0063]
[0064] where q is the angular position, is the angular acceleration, M is the moment of inertia, m is the mass of the connecting rod, g is the acceleration of gravity, F is the force, and l is the length of the connecting rod;
[0065] S1.2, establish the initial state equation of the manipulator system:
[0066] The state variables and control inputs of the manipulator system are defined as follows:
[0067]
[0068] where x 1 , x 2 is the state variable of the manipulator system, u is the control input of the manipulator system, is the angular velocity;
[0069] Then the dynamic equation (1) of the manipulator system is express...
Embodiment 2
[0106] The purpose of this embodiment 2 is to provide a computing device, including a memory, a processor, and a computer program stored on the memory and running on the processor, and the processor implements the following steps when executing the program, including:
[0107] Step S1, designing an observer, specifically: establishing a dynamic equation of the manipulator system; establishing an initial state equation of the manipulator system; designing a finite-time disturbance observer; establishing a state equation of the manipulator system;
[0108] In step S2, the manipulator controller is designed based on the backstepping method.
Embodiment 3
[0110] The purpose of this embodiment 3 is to provide a computer-readable storage medium on which a computer program is stored, and when the program is executed by a processor, the following steps are performed:
[0111] Step S1, designing an observer, specifically: establishing a dynamic equation of the manipulator system; establishing an initial state equation of the manipulator system; designing a finite-time disturbance observer; establishing a state equation of the manipulator system;
[0112] In step S2, the manipulator controller is designed based on the backstepping method.
[0113] The steps and methods involved in the apparatus of the above embodiments correspond to those of Embodiment 1, and for specific implementation methods, please refer to the relevant description part of Embodiment 1. The term "computer-readable storage medium" should be understood to include a single medium or multiple media including one or more sets of instructions: it should also be underst...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com