A uuv trajectory tracking control method to avoid differential explosion
A technology of trajectory tracking and differential explosion, which is applied in the direction of adaptive control, general control system, control/regulation system, etc., and can solve problems such as complex controller design, affecting control accuracy, and input saturation of actuators
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
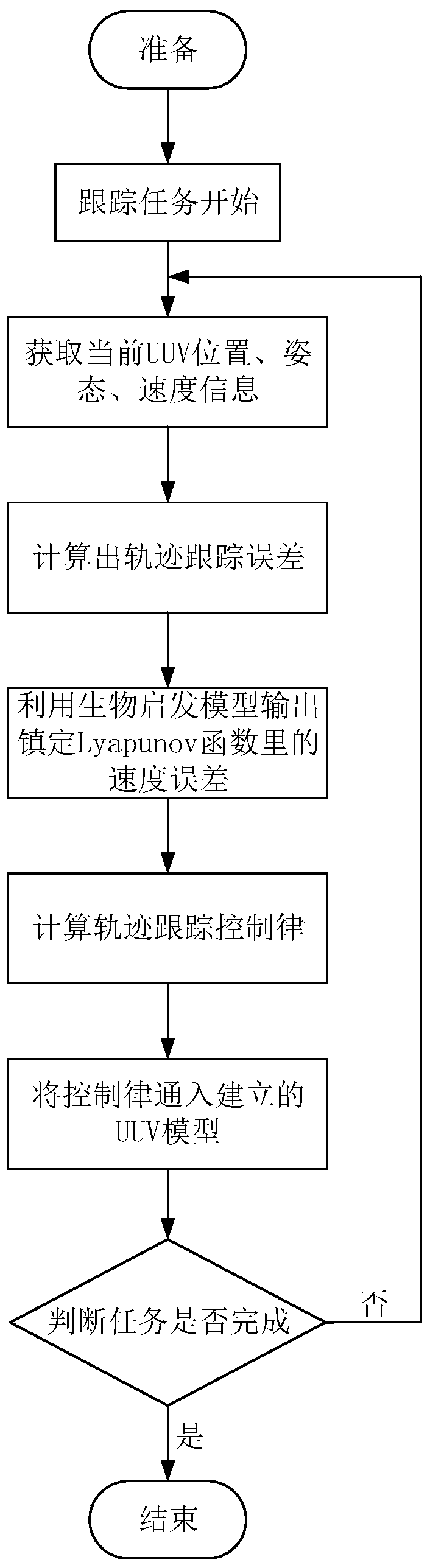
[0068] The following example describes in detail the UUV trajectory tracking control method for avoiding differential explosion of the present invention:
[0069] In step 1, according to the current task, the UUV gives the expected trajectory position information to the UUV, and collects data through the on-board navigation equipment and sensors to obtain the current position X(t)=[x(t),y(t),z (t)] T Information, attitude [θ(t), ψ(t)] T Information, speed V(t)=[u(t), v(t), ω(t), q(t), r(t)] T information.
[0070] Then the UUV acquires the initial position X(t)=[x(t),y(t),z(t)] in the ground coordinate system T , UUV initial heading angle ψ(t), pitch angle θ(t), UUV initial longitudinal velocity u r (t), lateral velocity v r (t) and yaw rate r(t), and given the desired trajectory position X d (t)=[x d (t),y d (t),z d (t)] T .
[0071] In step 2, use the information in step 1 to calculate the position error between the actual trajectory and the expected trajectory an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com