


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Robot walking path scheduling management method
A dispatch management and robot technology, applied in vehicle position/route/altitude control, instruments, control/regulation systems, etc., can solve the problems of low patrol safety and low patrol efficiency, and achieve the goal of improving patrol efficiency, ensuring safety, realizing The effect of route scheduling management
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
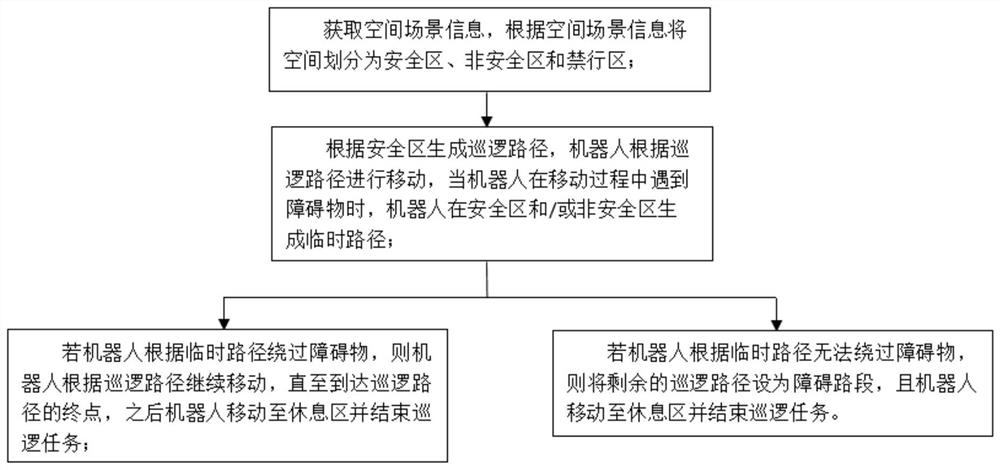
[0038] combine figure 1 As shown, a scheduling management method of a robot walking path of the present invention comprises the following steps:
[0039]1) Divide the area
[0040] Obtain space scene information, and divide the space into safe area, non-safe area and forbidden area according to the space scene information; it is worth noting that the safe area is used for robots to patrol, and the non-safe area is used for robots to bypass obstacles. And the robot is prohibited from moving in the forbidden zone.
[0041] 2) Generate patrol path
[0042] A patrol path is generated according to the safety area, specifically, a patrol path is generated in the safety area according to the patrol purpose. Then the robot moves according to the patrol path, that is, the robot patrols in the safe area, so that the patrol purpose can be realized under the condition of ensuring safety.
[0043] 3) Obstacle bypass
example 1
[0044] When the robot encounters an obstacle while moving on the patrol path, the robot generates a temporary path in the safe area and / or non-safe area, and the robot moves according to the temporary path, so that the obstacle can be bypassed. It is worth noting that if The robot bypasses the obstacle according to the temporary path, then the robot continues to move according to the patrol path until it reaches the end of the patrol path, and then the robot moves to the rest area and ends the patrol task; if the robot cannot bypass the obstacle according to the temporary path, the remaining The patrol path is set as an obstacle section, and the robot moves to the rest area and ends the patrol mission. The following is an example of obstacle circumvention. In this example, the robot first obtains judgment information and then moves accordingly. Specifically, follow the steps below to realize obstacle circumvention:
[0045] Step 1: When the robot goes around the obstacle and h...
example 2
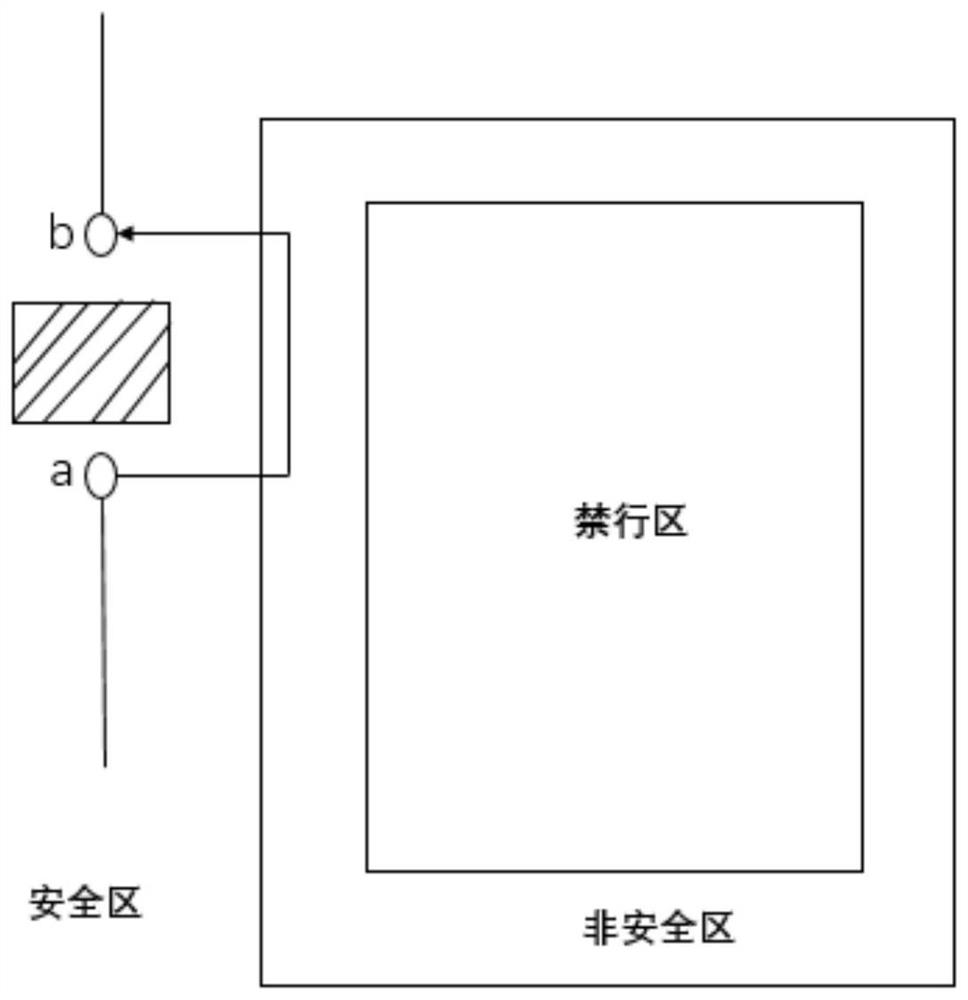
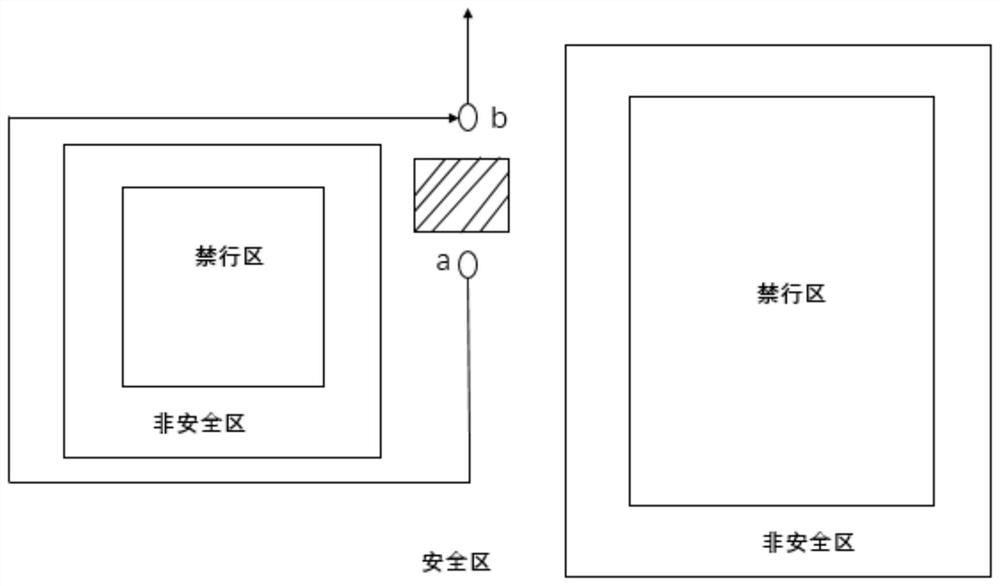
[0051] It is worth noting that the shortest detour paths generated in the above steps are all temporary paths, and the example of the above steps is aimed at the scene where the robot makes a logical judgment based on the spatial scene information and then moves accordingly. The present invention is not limited thereto. When the robot of the present invention encounters an obstacle, it can make corresponding judgments during the moving process. The second example of the obstacle circumvention method is given below, and the specific steps are as follows:
[0052] Step 1: When the robot must leave the path when it is going around obstacles, set the position of leaving the path as point a, and judge whether the robot can take a point on the path in front of point a along the forward direction and within the patrol accuracy, It is worth noting that the patrol accuracy of the present invention is set to n centimeters, that is, it is judged whether the robot can calibrate and obtain ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com