Anti-collision detection method and device oriented to multiple cooperative robots
A multi-robot and detection device technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of high cost, small field of view, inaccurate calculation, etc. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described in detail below in conjunction with the accompanying drawings.
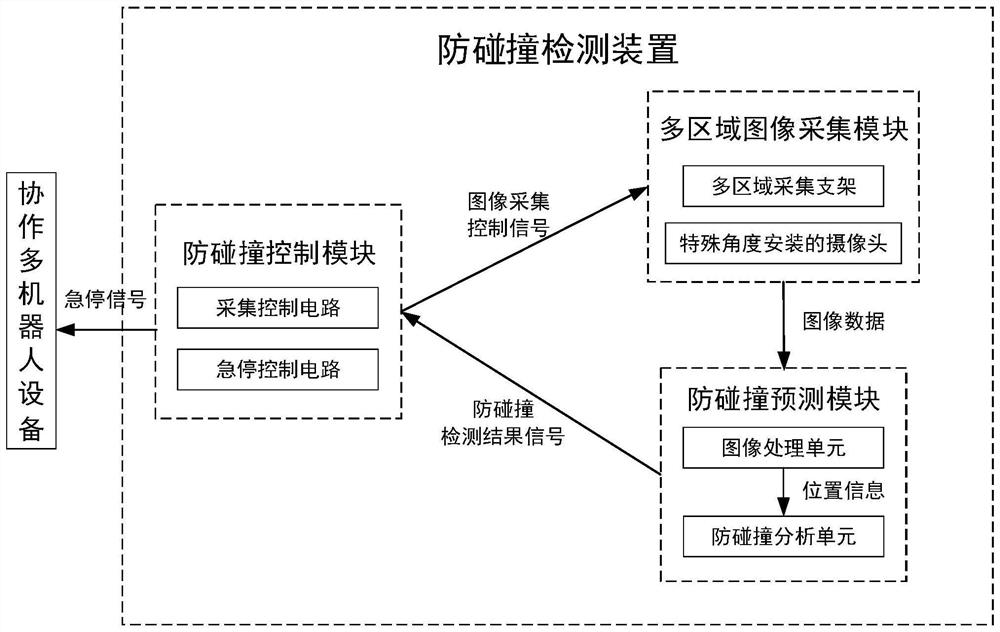
[0031] A multi-vision anti-collision detection device for collaborative multi-robots, such as figure 1 As shown, it includes: a multi-region image acquisition module, an anti-collision prediction module and an anti-collision control module. The multi-area image acquisition module receives the control signal of the anti-collision control module, is responsible for collecting images from the collaborative multi-robot equipment, inputs the collected image data to the anti-collision prediction module, and feeds back to the control module according to the data processing results for collaborative multi-robots. Emergency stop control of robotic equipment.
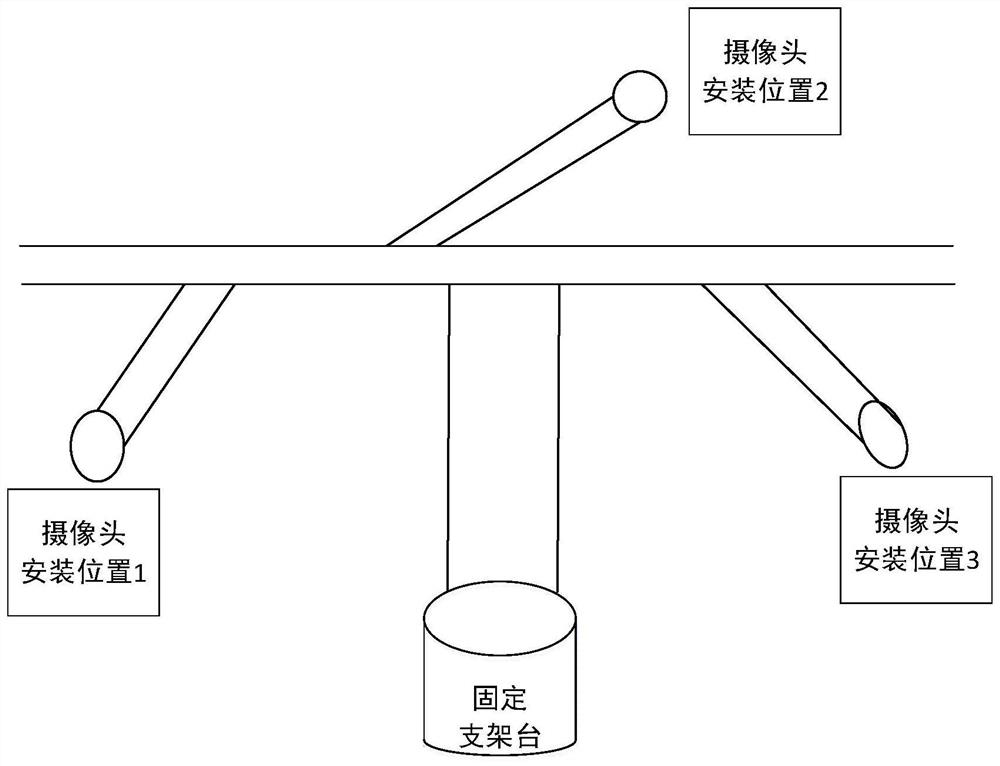
[0032] In the multi-area image acquisition module, since the collaborative multi-robot will have multiple locations where collisions between parts are likely to occur in a large work area, monocular cameras nee...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com