An intelligent trajectory tracking control method for mobile robots
A mobile robot and trajectory tracking technology, applied in the field of control, can solve the problems of mobile robot modeling difficulty, low feasibility, model cannot completely replace the nonlinear robot model, etc., and achieve good trajectory tracking effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] In order to make the objectives, technical solutions and advantages of the present invention clearer, the technical solutions of the present invention are further described below with reference to the accompanying drawings and actual experiments.
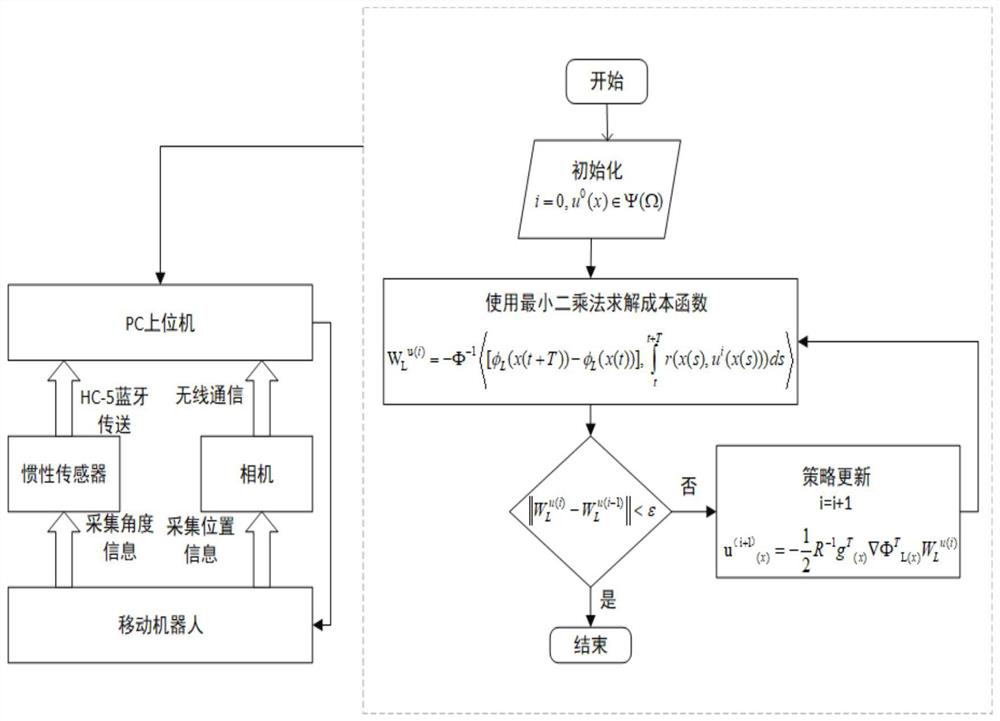
[0060] refer to Figure 1-Figure 4 , an intelligent trajectory tracking control method for mobile robots. For a given mobile robot model, the convergence of the least squares method is used to estimate the weights; and the weights of the controller are updated by introducing the method of neural network and policy iteration in reinforcement learning. , to find the optimal value function.
[0061] The intelligent trajectory tracking control method of the mobile robot of the present embodiment includes the following steps:
[0062] 1) Build a mobile robot nonlinear system;
[0063] 2) Initialize the state variables of the system and give an initial strategy;
[0064] 3) Use the reinforcement learning strategy iterative method ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com