Navigation instruction analysis method of single-steering-wheel type transfer robot
A technology for handling robots and navigation instructions, applied in navigation calculation tools, etc., can solve problems such as inaccurate speed and angle of forklift steering wheels, and achieve the effects of improving operating efficiency, trajectory tracking performance, and accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
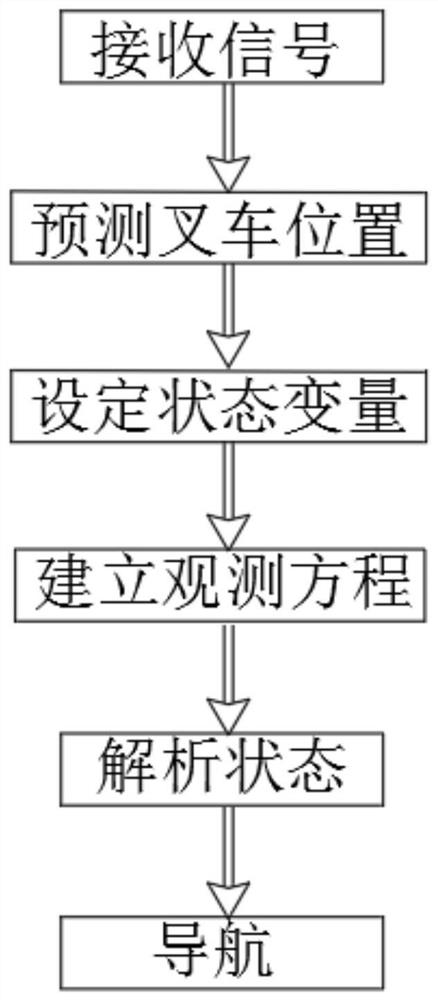
[0035] refer to Figure 1-3 , a method for parsing navigation instructions of a single rudder wheel handling robot, comprising the following steps:
[0036] S1: Receive signals, receive signal instructions from the navigation system;
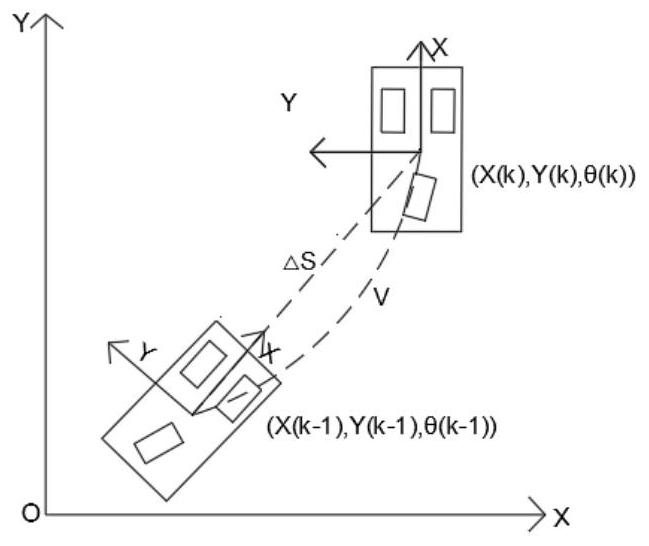
[0037] S2: Predict the position of the forklift, the prediction equation is
[0038] S3: Set the state variable, the set state variable is represented by x, and its calculation equation is
[0039]
[0040] S4: Establish the observation equation. After setting the state variables, establish the state observation equation of the single steering wheel forklift. The equation is
[0041]
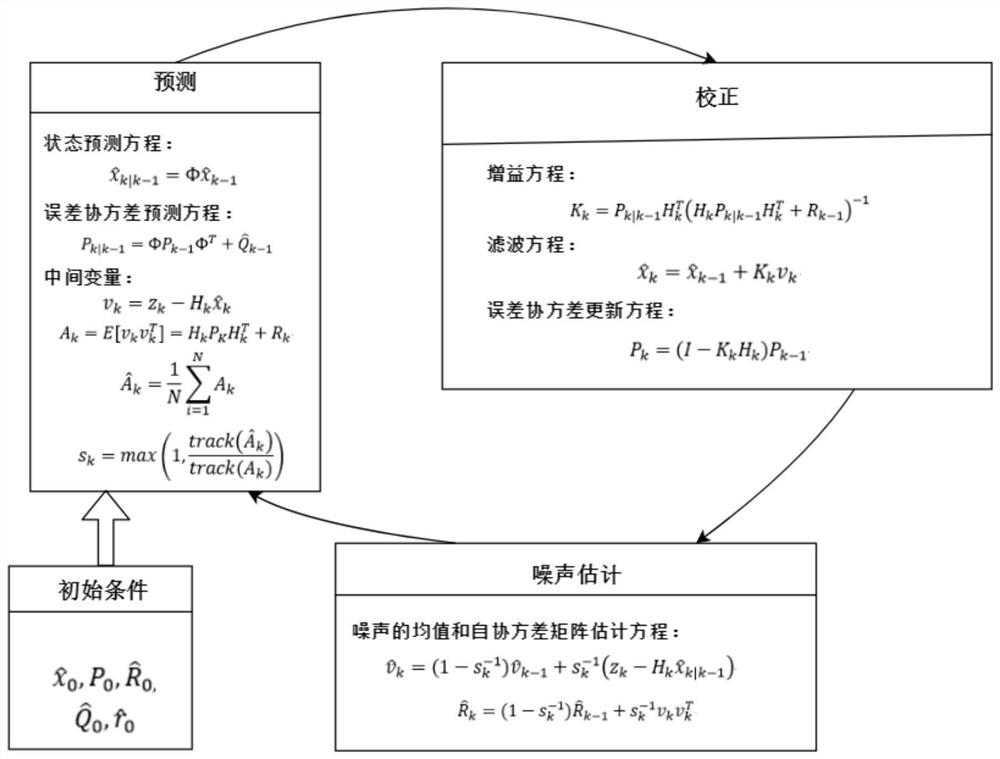
[0042] S5: Analytical state. Kalman filter algorithm is used to calculate the analytical state. The analytical state includes predicted state, corrected position and noise estimation. The calculation equation is
[0043]
[0044] S6: Navigation, navigate according to the parsed state.
[0045] S1 of the present invention includes a receiving module,...
Embodiment 2
[0048] refer to Figure 1-3 , a method for parsing navigation instructions of a single rudder wheel handling robot, comprising the following steps:
[0049] S1: Receive signals, receive signal instructions from the navigation system;
[0050] S2: Predict the position of the forklift, the prediction equation is
[0051] S3: Set the state variable, the set state variable is represented by x, and its calculation equation is
[0052]
[0053] S4: Establish the observation equation. After setting the state variables, establish the state observation equation of the single steering wheel forklift. The equation is
[0054]
[0055] S5: Analytical state. Kalman filter algorithm is used to calculate the analytical state. The analytical state includes predicted state, corrected position and noise estimation. The calculation equation is
[0056]
[0057] S6: Navigation, navigate according to the parsed state.
[0058] S1 of the present invention includes a receiving module,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com