Wheeled robot data-driven iterative learning control method under DOS attack
An iterative learning control and wheeled robot technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problem of jumping speed of WMR trajectory tracking without discussion, cannot guarantee the complete trajectory tracking of the robot, and does not consider The impact of trajectory tracking performance and other issues, to achieve complete trajectory tracking, save bandwidth resources, and reduce difficulties
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0077] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific embodiments.
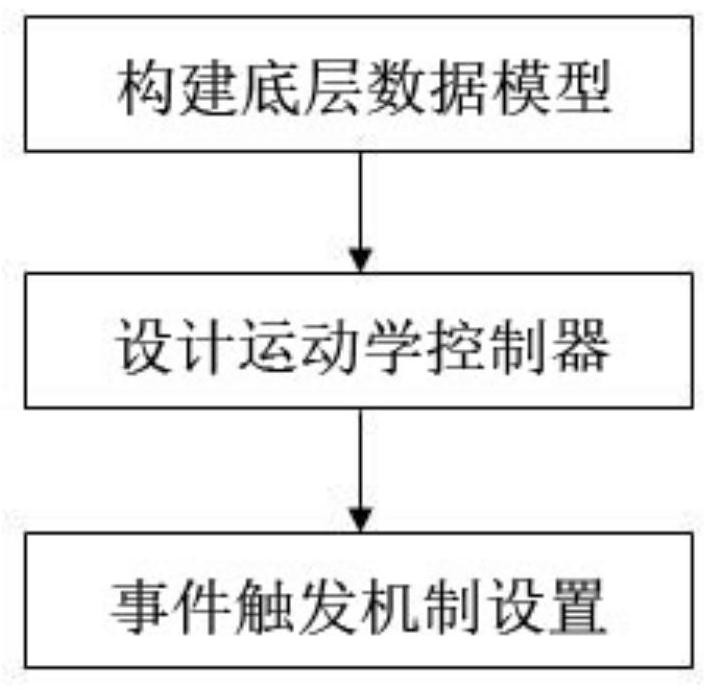
[0078] Such as figure 1 As shown, a data-driven iterative learning control method for wheeled robots under DOS attacks, including the following steps:
[0079] S1. Construct the underlying data model, establish the dynamic model and kinematics model of the wheeled mobile robot, and then discretize the constructed dynamics model and kinematics model by the Euler method to obtain the discretized model, and finally pass Dynamic linearization technology transforms the discretized model into an online data-driven model along the iterative domain;
[0080] S2. Design the kinematic controller. Based on the online data-driven model obtained in step S1, first design the PPD parameter estimation criterion function and the control input criterion function, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com