The layout structure of the mechanical arm of a minimally invasive surgical robot
A technique of surgical robot and minimally invasive surgery, applied in the field of mechanical arm layout structure, to achieve the effect of expanding the distribution range, high applicability, and high flexibility
Active Publication Date: 2022-06-03
QIANFOSHAN HOSPITAL OF SHANDONG
View PDF16 Cites 0 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
[0004] Minimally invasive surgical robots are high-tech intensive high-end precision medical equipment. There is no self-produced minimally invasive surgical robot system that can be clinically applied in the Chinese market. Existing foreign minimally invasive surgical robots have layout flexibility in the overall structure There are still some deficiencies in the balance of force and force, as well as the efficiency of preoperative planning and layout
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
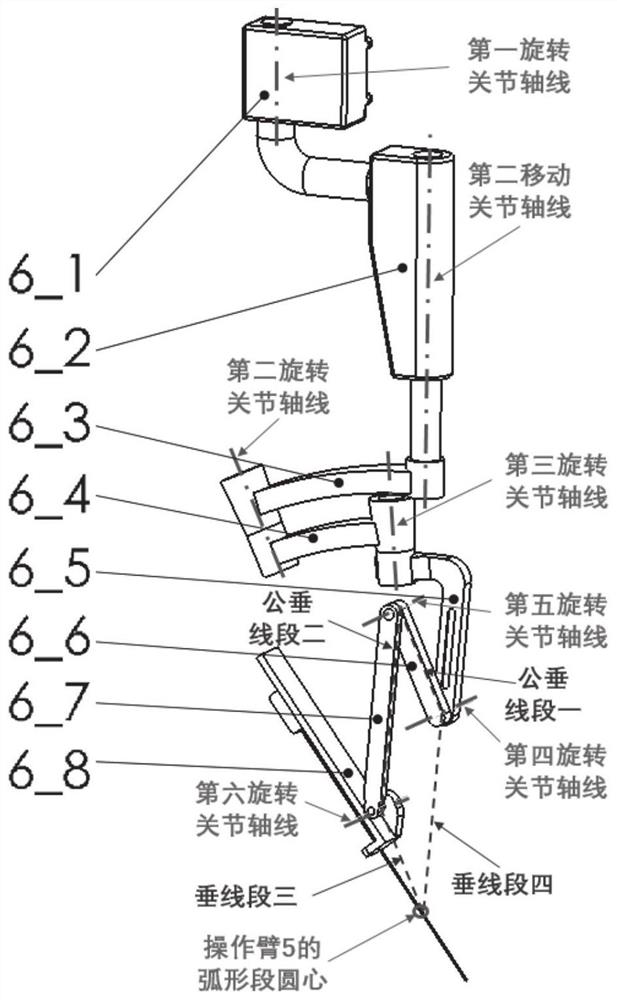
[0057] The operating arm V6_5 is an operating arm similar to the "7" shape; it includes an arcuate segment and a radial direction along the arcuate segment
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
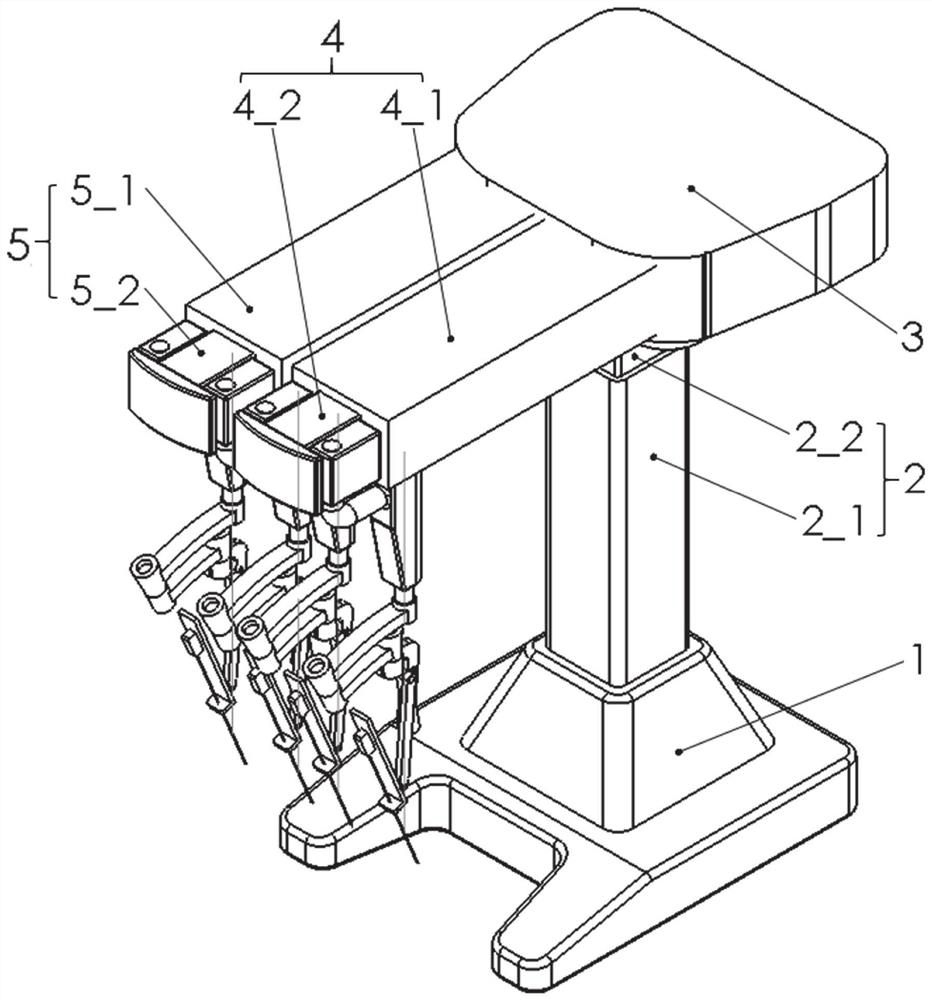
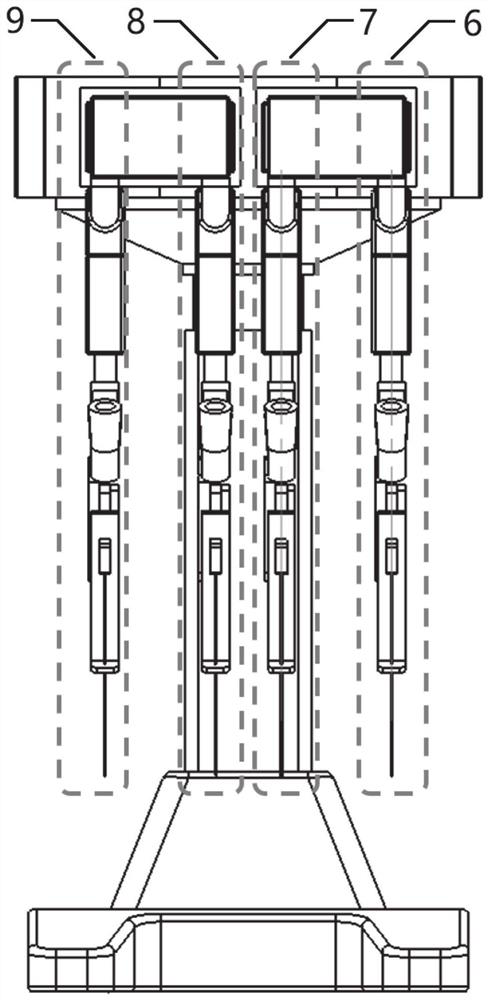
The invention discloses a mechanical arm layout structure of a minimally invasive surgical robot, comprising a base, a column, a top platform, an adjusting main arm and an adjusting sub-arm; the adjusting main arm is installed on the joint of the top platform; the adjusting sub-arm is installed on the On the above-mentioned adjusting main arm; the adjusting sub-arms each include a plurality of operating arm sections and a connecting seat connected in series in sequence, and the adjacent arm sections, and between the arm sections and the connecting seat are connected by rotating joints or moving joints, and the connection The seat is connected with a quick-connect joint, and an endoscope or surgical tool is installed on the quick-connect joint. Adjusting the respective operating arm I, operating arm II and operating arm II of the adjusting sub-arm can realize that the surgical instrument reaches the position of stretching into the wound quickly. Positioning, on this basis, adjust their corresponding operating arms IV, operating arm V, and operating arm VI to realize the rotation of the surgical instrument arm around the wound position, and finally extend into the wound at a suitable angle.
Description
The mechanical arm layout structure of a minimally invasive surgical robot technical field The present invention relates to the technical field of minimally invasive surgical robots, in particular to a kind of minimally invasive surgical robots. Robotic arm layout structure. Background technique Minimally invasive surgical operation refers to that the doctor uses slender surgical tools to probe into the body through tiny incisions on the surface of the human body. Compared with traditional open surgery, it has the advantages of smaller surgical incision, less bleeding, less postoperative scars, and less time for recovery. It has the advantages of fast time and so on, which greatly reduces the pain suffered by the patient. Minimally invasive surgery can bring many benefits to the patient, but a series of difficulties are added to the operation of the doctor, and the doctor must Long-term training is required to perform minimally invasive surgical operations, and sur...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & Authority Patents(China)
IPC IPC(8): A61B34/30A61B34/00
CPCA61B34/30A61B34/70A61B2034/302
Inventor 胡三元张光永白儒冯红光田兆辉孙鹏伟
Owner QIANFOSHAN HOSPITAL OF SHANDONG
Features
- Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
Why Patsnap Eureka
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Social media
Patsnap Eureka Blog
Learn More Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com