Differential value compensation mechanism applied to manipulator
A technology of compensation mechanism and manipulator, which is applied in the field of medical equipment, can solve the problems that cannot be applied in the medical field, and achieve the effect of flexible operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
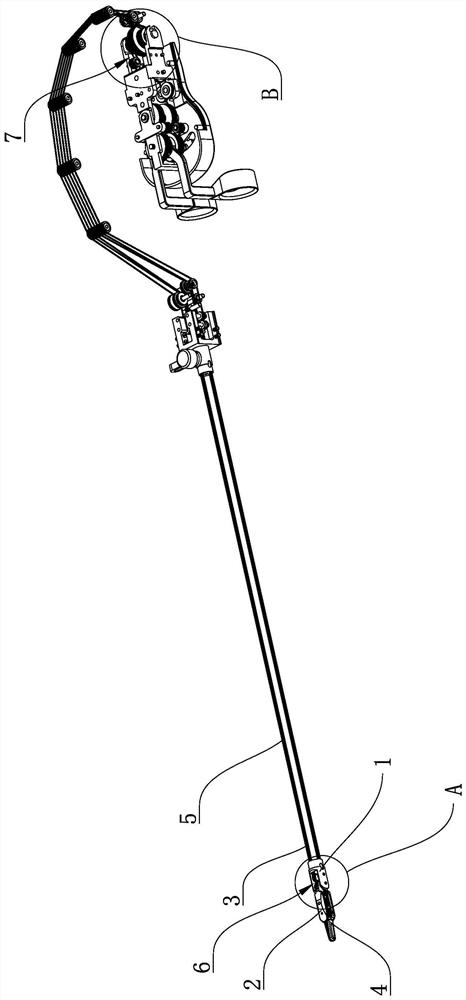
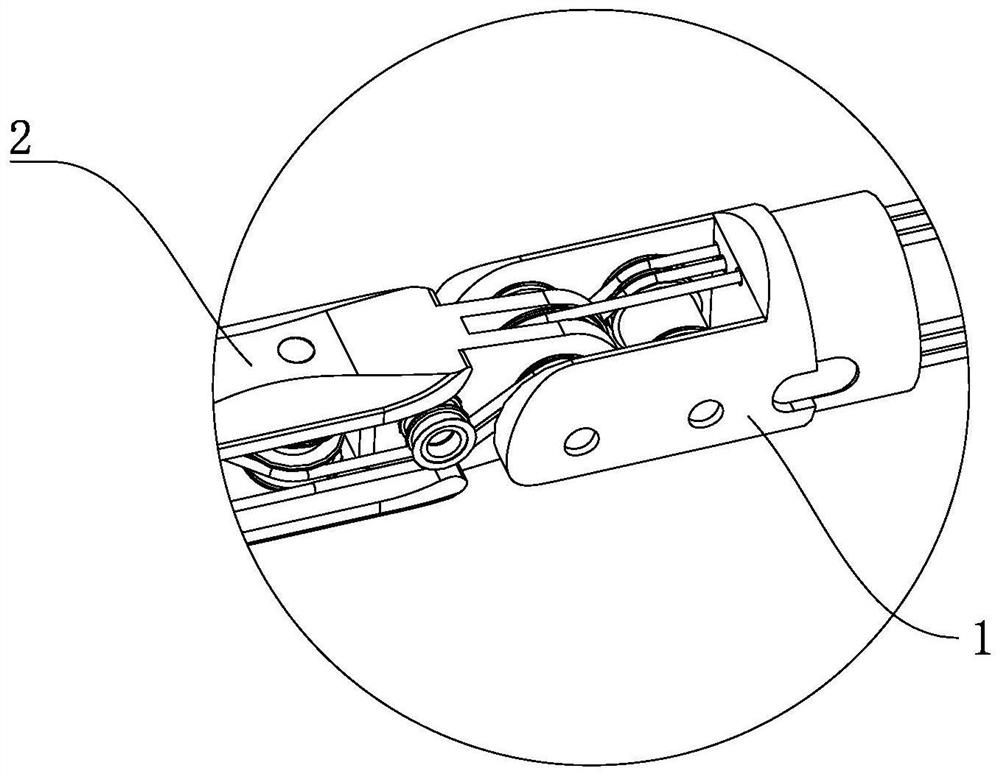
[0029] combine Figure 1-4 As shown, a difference compensation mechanism applied to a manipulator includes a clamp head base 1 and a clamp head assembly 4 that is rotatably connected to the clamp head base 1. The second control rope 5 is connected to the clamp head assembly 4 and pulls the second control The rope 5 can make the pliers head assembly 4 rotate.
[0030] The pincer head assembly 4 can rotate under the pulling control of the second control rope 5 . But usually not only the jaw assembly 4 is a movable joint on the surgical forceps. 1 is provided with a rotating assembly 2, one end of the rotating assembly 2 is rotatably connected with the pliers seat 1, and the other end is rotatably connected with the pliers assembly 4, and the rotating direction of the rotating assembly 2 is different from that of the pliers assembly 4 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com