Adaptive robust control method and device for underactuated hydraulic single-leg assisted exoskeleton
A technology of adaptive robustness and control method, applied in the direction of program control manipulators, manufacturing tools, manipulators, etc., can solve the problems of weak system robustness, and achieve the effect of flexible layout, light weight and light weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
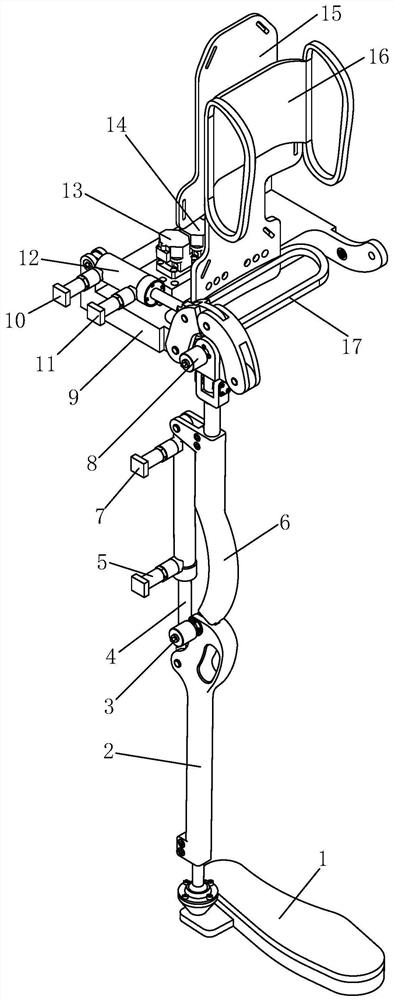
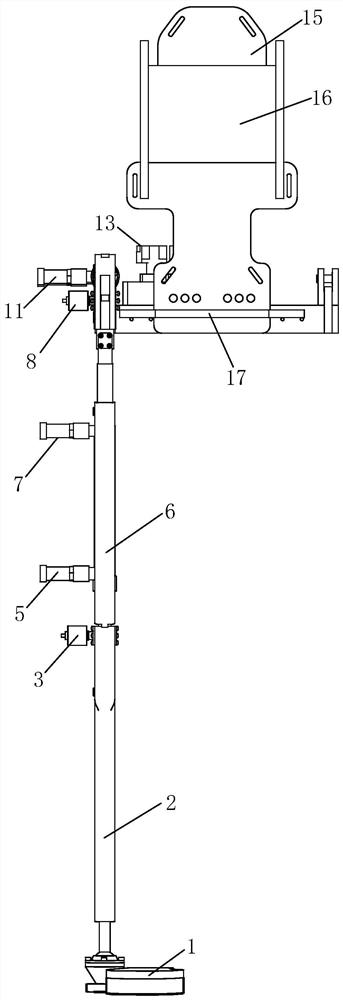
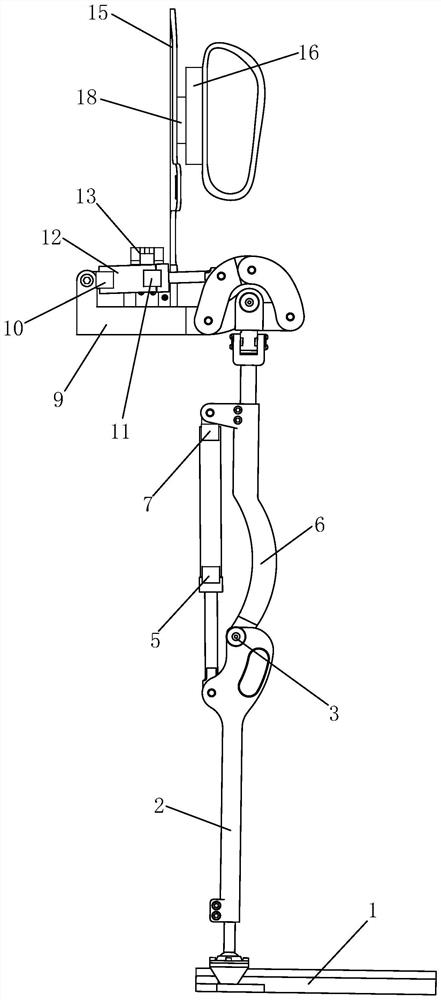
[0166] see figure 1 , this embodiment provides an adaptive robust control method for an underactuated hydraulic single-leg power-assisted exoskeleton, and the control method is used to control an under-actuated hydraulic single-leg power-assisted exoskeleton. The underactuated hydraulic single-leg power-assisted exoskeleton includes the underactuated hydraulic single-leg power-assisted exoskeleton for control. The underactuated hydraulic single-leg power-assisted exoskeleton includes a foot 1, a first rod 2, a knee joint encoder 3, a knee joint hydraulic cylinder 4, a pressure sensor 5 in the lower cavity of the knee joint hydraulic cylinder, a second connecting rod 6, a knee joint Hydraulic cylinder upper cavity pressure sensor 7, hip joint encoder 8, base plate 9, hip joint hydraulic cylinder upper cavity pressure sensor 10, hip joint hydraulic cylinder lower cavity pressure sensor 11, hip joint hydraulic cylinder 12, knee joint electro-hydraulic servo valve 13 , hip joint ...
Embodiment 2
[0280] This embodiment provides an underactuated hydraulic single-leg power-assisted exoskeleton, which is similar to the under-actuated hydraulic single-leg power-assisted exoskeleton in Embodiment 1, the difference is that the real-time controller in this embodiment directly executes Embodiment 1 The self-adaptive robust force control method in the exoskeleton enables each part of the exoskeleton to achieve a good follow-up and assisting effect on human motion.
Embodiment 3
[0282] This embodiment provides an adaptive robust control device for an underactuated hydraulic single-leg power-assisted exoskeleton, which applies the adaptive robust control method for an under-actuated hydraulic single-leg power-assisted exoskeleton in Embodiment 1. Wherein, the control device includes an initialization module 1, an initialization module 2, an initialization module 3, a model building module, a reference displacement acquisition module, an actual displacement acquisition module, a servo valve control voltage acquisition module, a transformation module and a following module.
[0283] The initialization module one is used to initialize the sampling period of the real-time controller, and the sampling period is between 10 and 20 milliseconds. The initialization module 2 is used to rotate the foot 1 to a horizontal position, rotate the first rod 2, the second rod 6 and the backboard 15 to a vertical position, initialize the knee joint encoder 3 and the hip jo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com