Underwater robot laying and recovery oscillation stopper, swing frame and system
An underwater robot, recycling system technology, applied in the directions of underwater operation equipment, transportation and packaging, devices for throwing or releasing ships, etc., can solve the problem that the umbilical cable cannot bear the weight of the underwater robot, and avoid the The effect of damage and protection of umbilical cables
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
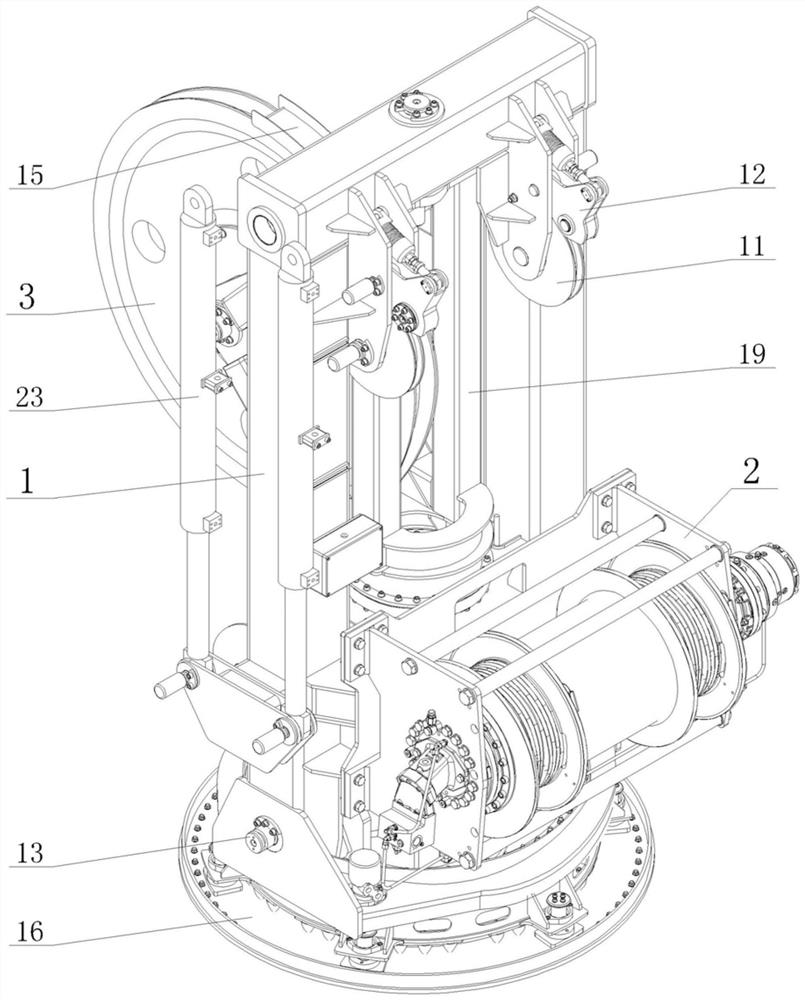
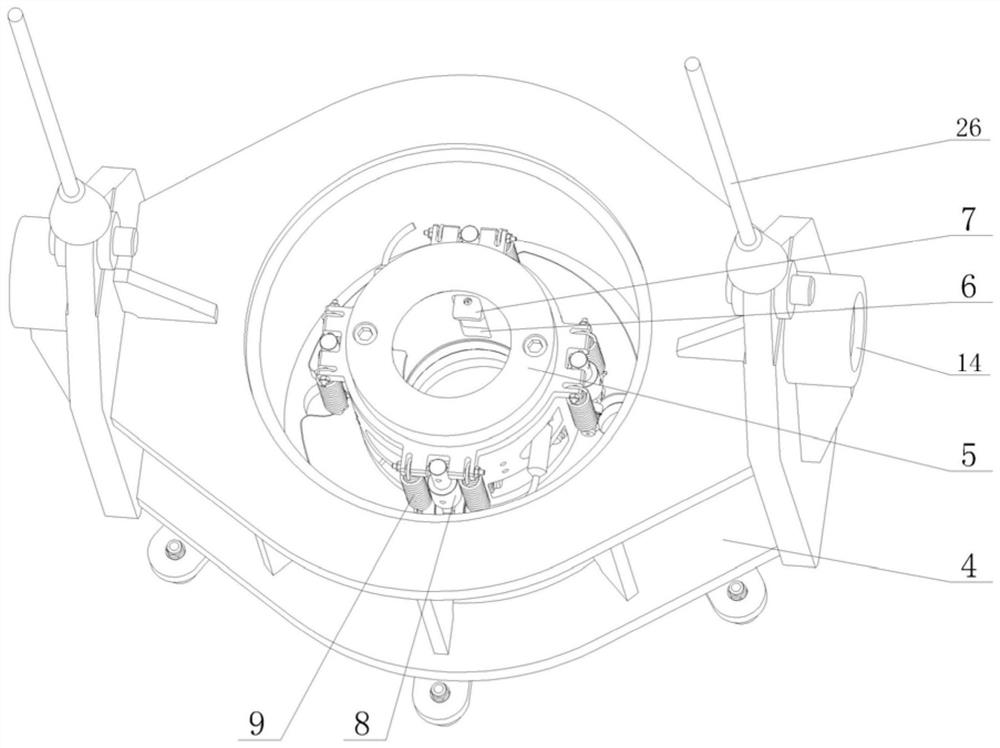
[0030] as attached Figure 1-4 As shown, a kind of underwater robot deploys and recovers the sway stop device, comprises fixed frame 1 and travel lock frame 4, and travel lock winch 2 is arranged respectively on fixed frame 1, and one end of steel wire rope 26 is set on travel lock winch 2, and the end of wire rope 26 The other end is connected with the free lock frame 4, and the middle part of the free lock frame 4 is provided with a lock body 5 with a through hole. The side wall of the lock body 5 is provided with at least two fixed grooves 6 along the circumferential direction, and each fixed groove 6 are provided with a latch 7, the middle part of the latch 7 is hinged with the side of the fixed groove 6, one end of the latch 7 is located in the through hole of the lock body 5, and the other end of the latch 7 is hinged to one end of the telescopic rod 8, telescopic The other end of bar 8 is hinged with lock body 5 . A mushroom head is set on the top of the underwater rob...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com