AGV route optimization and real-time scheduling method
A real-time scheduling and route technology, applied in vehicle position/route/height control, control/regulation system, non-electric variable control, etc., can solve problems such as limited application and time-consuming problem solving, and achieve high-efficiency utilization Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
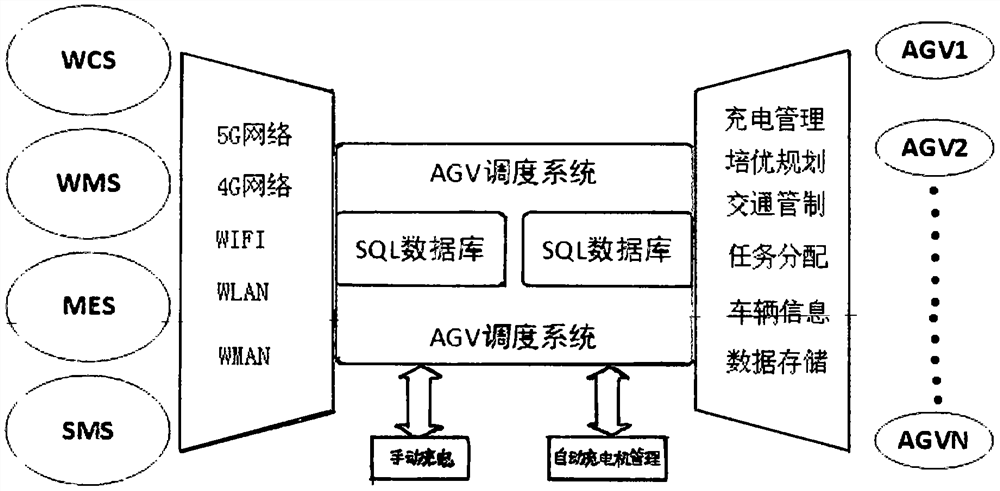
[0008] Implement a kind of AGV route optimization and real-time scheduling method of the present invention, comprise mathematical planning method, simulation method and artificial intelligence method, mathematical planning method can select the best task and the best path for AGV, can be summarized as a task scheduling method, The mathematical programming method adopts integer programming, dynamic programming, and petri method. The simulation method is to simulate the implementation of a scheduling scheme of AGV by modeling the actual scheduling environment. The simulation method adopts the discrete event simulation method, which is oriented to The simulation method of the object and the 3D simulation technology method. The artificial intelligence method describes the scheduling process of the AGV as a process of searching for the optimal solution in the solution set that satisfies the constraints. The artificial intelligence method includes human knowledge and uses knowledge re...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com