


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Auxiliary system for crop picking in facility agriculture environment and control method
A facility agriculture and auxiliary system technology, applied in agriculture, picking machines, program-controlled manipulators, etc., can solve the problems of reducing fruit and vegetable picking efficiency, uneven spatial distribution of target fruits and vegetables, and inaccessibility of target fruits and vegetables, so as to save manpower and improve Stability, the effect of expanding the picking range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
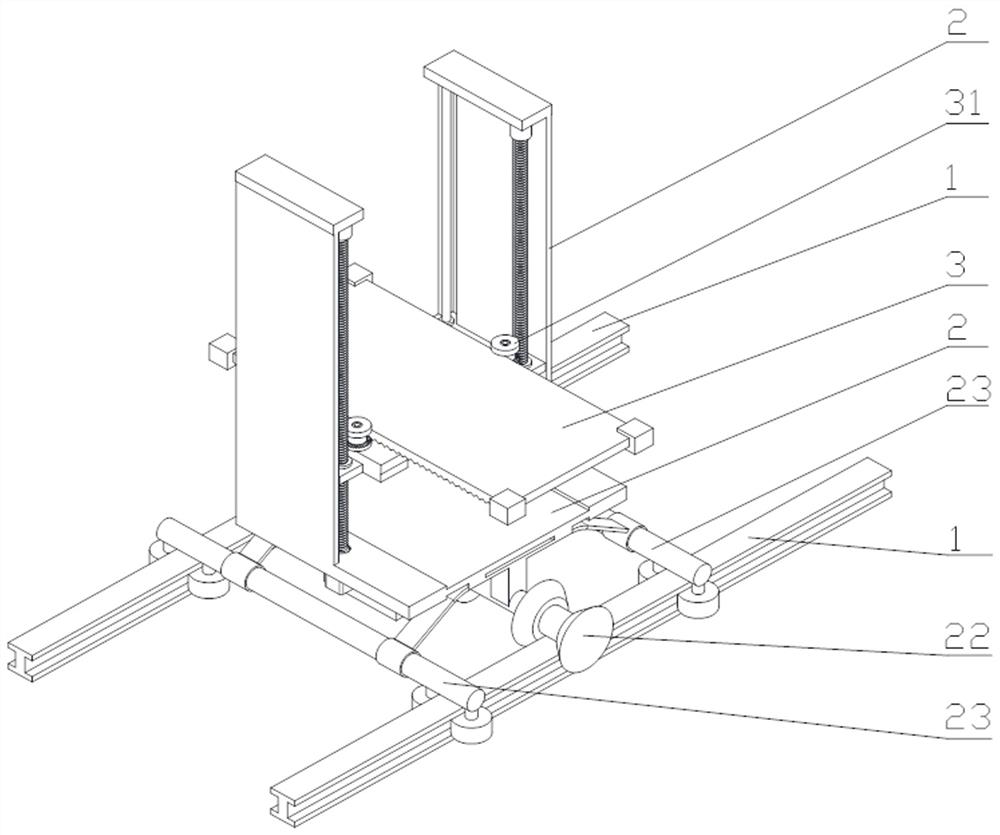
[0049] The auxiliary system for picking in the facility agricultural environment, such as figure 1 As shown, it includes a guide rail 1 , a chassis mechanism 2 and a mobile platform 3 .
[0050] The cross section of the guide rail 1 is I-shaped, the groove is in the horizontal direction, and is fixed on the ground, and the two guide rails are parallel to each other.
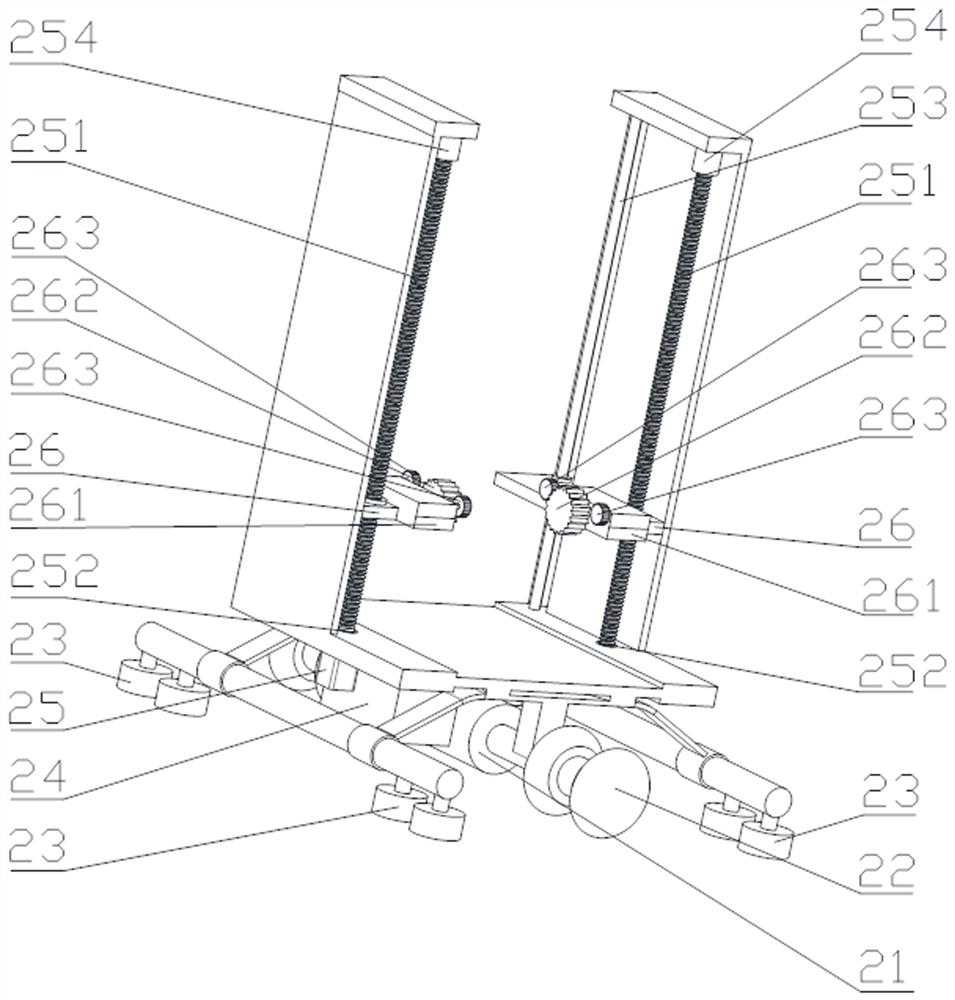
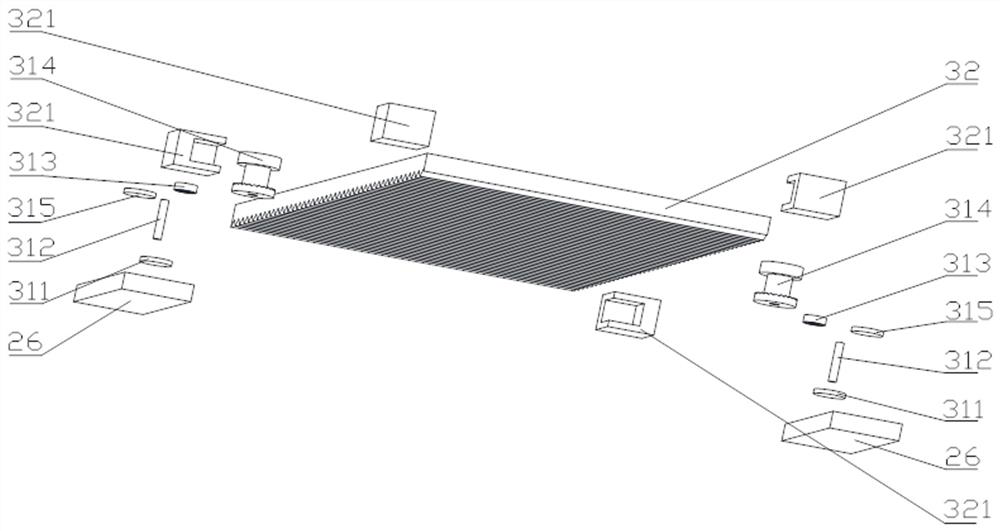
[0051] The chassis mechanism includes a support base plate and a U-shaped frame formed by vertical baffles on both sides of the support base plate. The chassis mechanism 2 is the carrier that realizes the movement of the system parallel to the crop direction. It is the system that normally runs on the guide rail 1. key structures such as figure 2 shown. The chassis mechanism 2 also includes: a DC motor 21 , a driving wheel 22 , a driven wheel 23 , a control system 24 , a stepping motor 25 , and a stage assembly 26 . The top of the stepper motor 25 includes a screw rod 251, a bearing 252, a guide rod 253, and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com