Moving device for equipotential robot, and equipotential robot
A mobile device and robot technology, applied in the direction of current collectors, non-rotating current collectors, circuits, etc., can solve the problems of poor barrier capability, poor performance of conductive rubber and wires, and easy wear of wires, etc. The effect of obstacle crossing ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
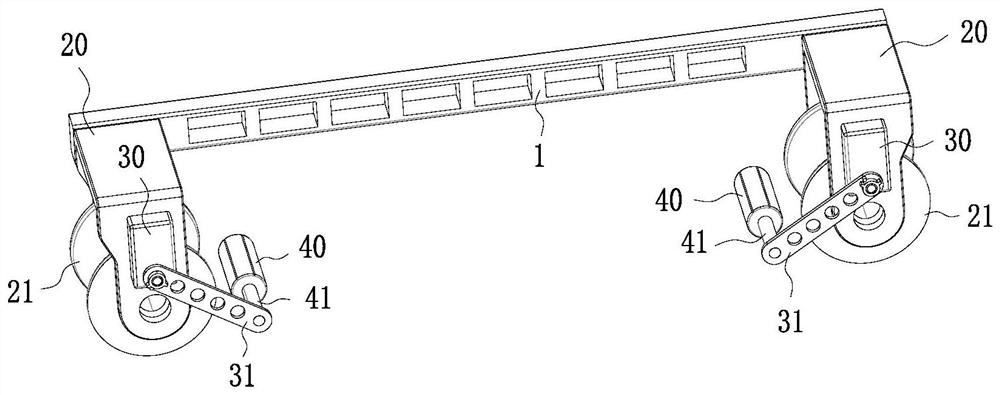
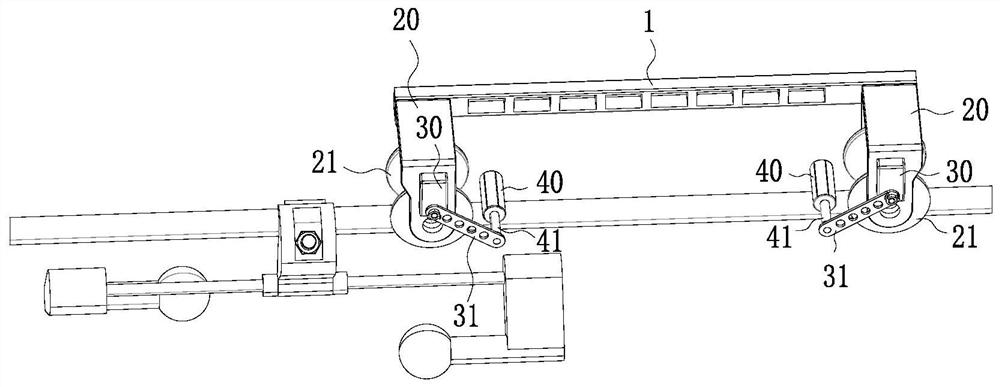
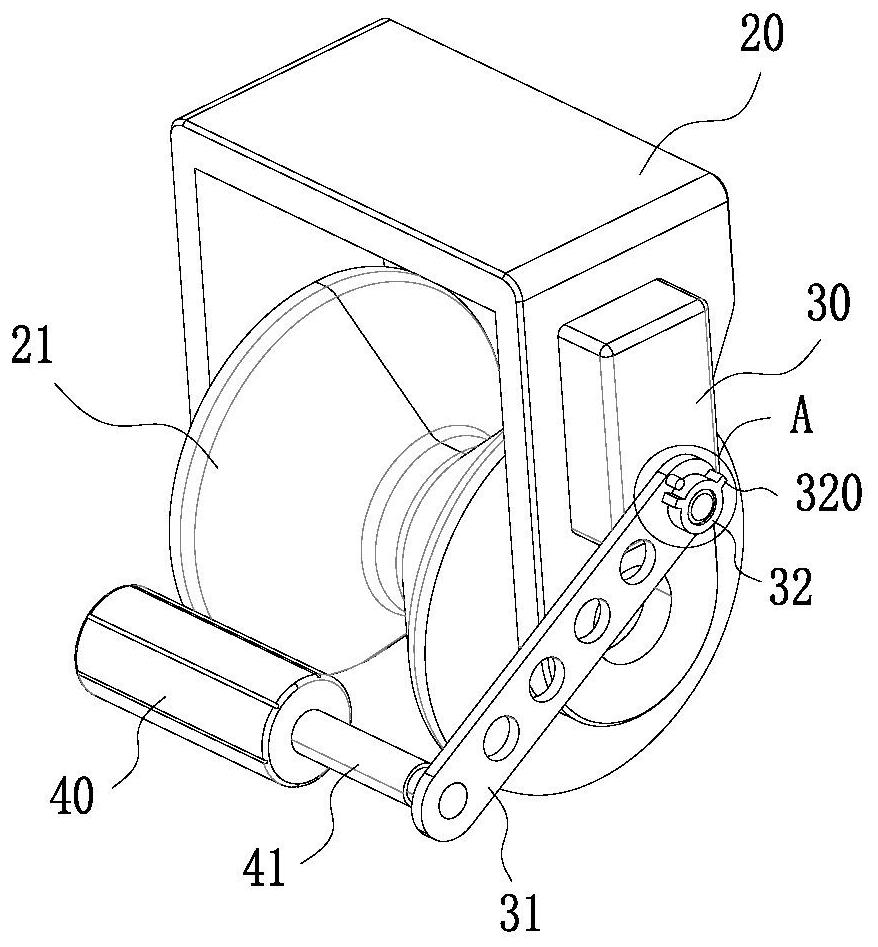
[0032] Such as Figure 1 to Figure 5 As shown, this embodiment shows a mobile device for an equipotential robot, including two walking wheels and a support frame 1 for connecting the two walking wheels, the walking wheels move on the power transmission wire, and the walking The wheel includes a roller 21 and a mounting bracket 20, the mounting bracket 20 is provided with a driving motor 30, and the driving motor 30 is provided with a connecting rod 31, and one end of the connecting rod 31 is connected with the driving motor 30, and the connecting rod 30 is connected to the driving motor 30. The other end of the rod 31 is provided with a conductive wheel 40, the conductive wheel 40 is on the power transmission wire, and is in contact with the power transmission wire, the driving motor 30 controls the rotation of the connecting rod 31, and the connecting rod 31 drives the conductive wheel 40 in the Roller 21 both sides switch back and forth.
[0033] In this embodiment, the tra...
Embodiment 2
[0046] This embodiment shows an equipotential robot. The equipotential robot includes a live working robot and a mobile device. The mobile device is used to assist the live working robot to move on the power transmission line. Mobile device for an isopotential robot as described in other identical embodiments.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com