Unmanned ship anti-collision Internet of Things control system and method based on artificial potential field method
An artificial potential field method and networked control technology, applied in the field of anti-collision Internet of Things control system for unmanned ships
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The present invention will be further described below in conjunction with drawings and embodiments.
[0050] An embodiment of the present invention is an anti-collision control system and method for an unmanned ship that collects multi-parameters of water quality.
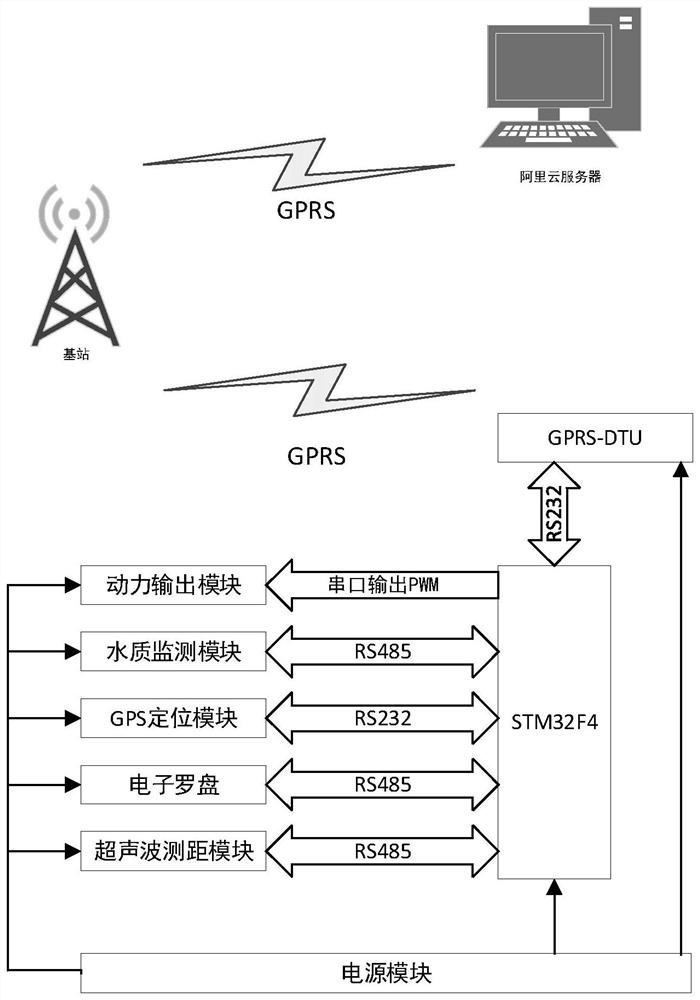
[0051] Such as figure 1 As shown, the anti-collision control system for unmanned ships based on the artificial potential field method is mainly composed of three parts: the perception layer, the transmission layer, and the application layer;
[0052] In the first part, the sensing layer is composed of a catamaran inflatable boat, a power output module, a power supply module, a control module, an information collection module, and a communication module to realize real-time monitoring of dissolved oxygen in water, pH value, and temperature. Collect these parameters and upload them to the server database.
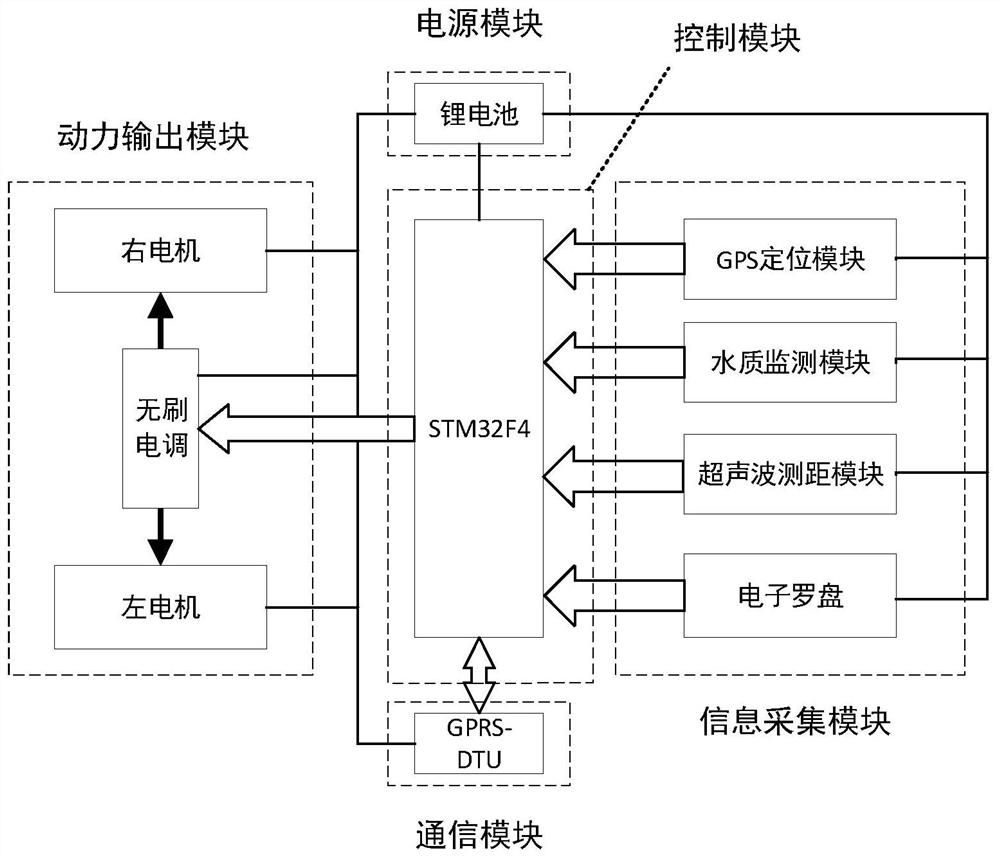
[0053] Such as figure 2 As shown, the unmanned ship is composed of a power output module, a power su...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com