Method and device for scheduling robots
A robot and purpose technology, applied in the computer field, can solve the problems of the lack of continuity of the robot's warehousing work, increasing the idle time of the robot, and reducing the work efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
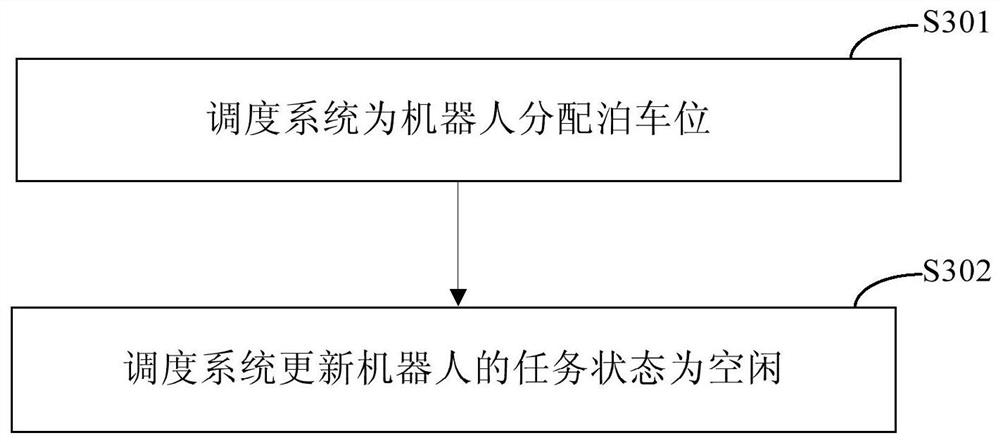
[0078] Step S301: the dispatching system allocates a parking space for the robot;
[0079] Step S302: The scheduling system updates the robot's task status to idle.
[0080] Figure 4 It is a schematic flow chart of the packing task of the method for dispatching robots according to a reference embodiment of the present invention.
[0081] Such as Figure 4 As shown, when the packing task is assigned to the robot, the process of the packing task can refer to the following implementation methods:
[0082] Step S401: When the robot arrives at the packing point, it sends an arrival message to the dispatching system;
[0083] Step S402: the scheduling system notifies the workstation where the packing point is located;
[0084] Step S403: the dispatching system sends an arrival prompt instruction to the robot;
[0085] Step S404: the workstation sends a packing completion message to the scheduling system when the packing is completed;
[0086] Step S405: The dispatching system...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com