An exoskeleton-assisted manipulator
A manipulator and exoskeleton technology, applied in passive exercise equipment, physical therapy and other directions, can solve the problem that the exoskeleton rehabilitation manipulator cannot effectively match the finger force process, etc., to improve the rehabilitation efficiency, ensure the rehabilitation effect, and facilitate the operation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be further described below in conjunction with accompanying drawing:
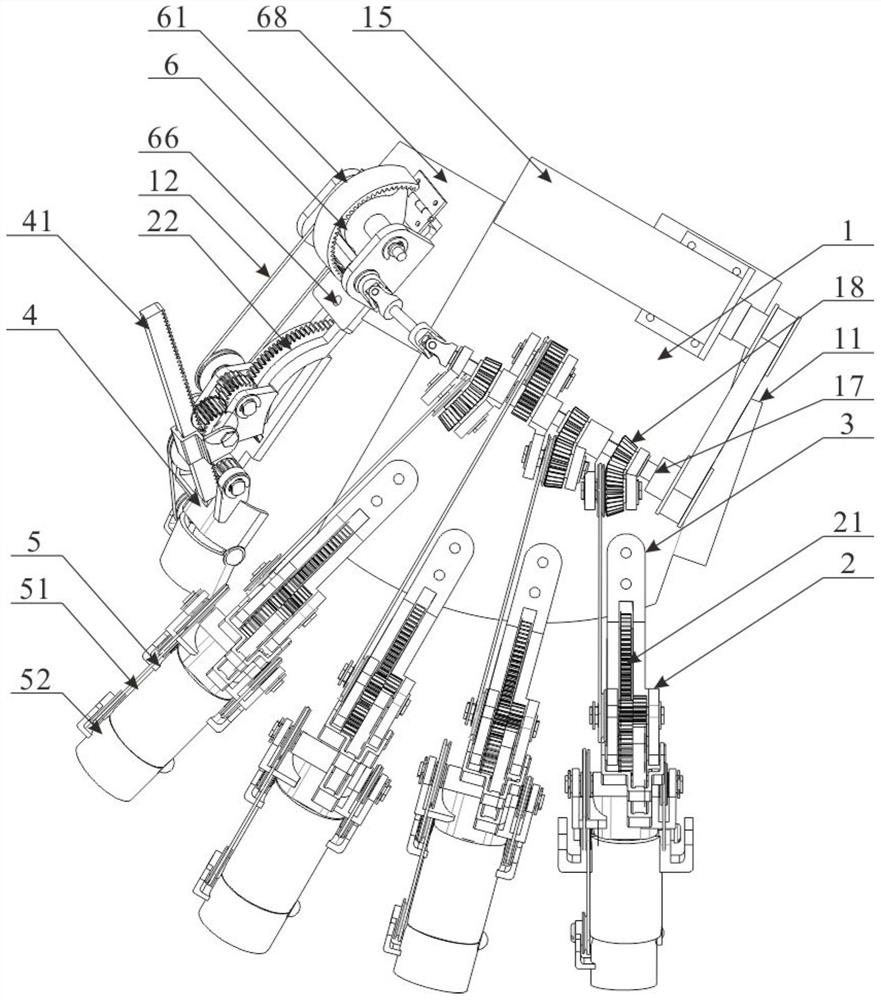
[0029] Such as figure 1 As shown in , it is a schematic diagram of the structure of the exoskeleton-assisted manipulator.
[0030] The exoskeleton-assisted manipulator of the present invention includes a back plate 1 and fingers 2 connected to each other.
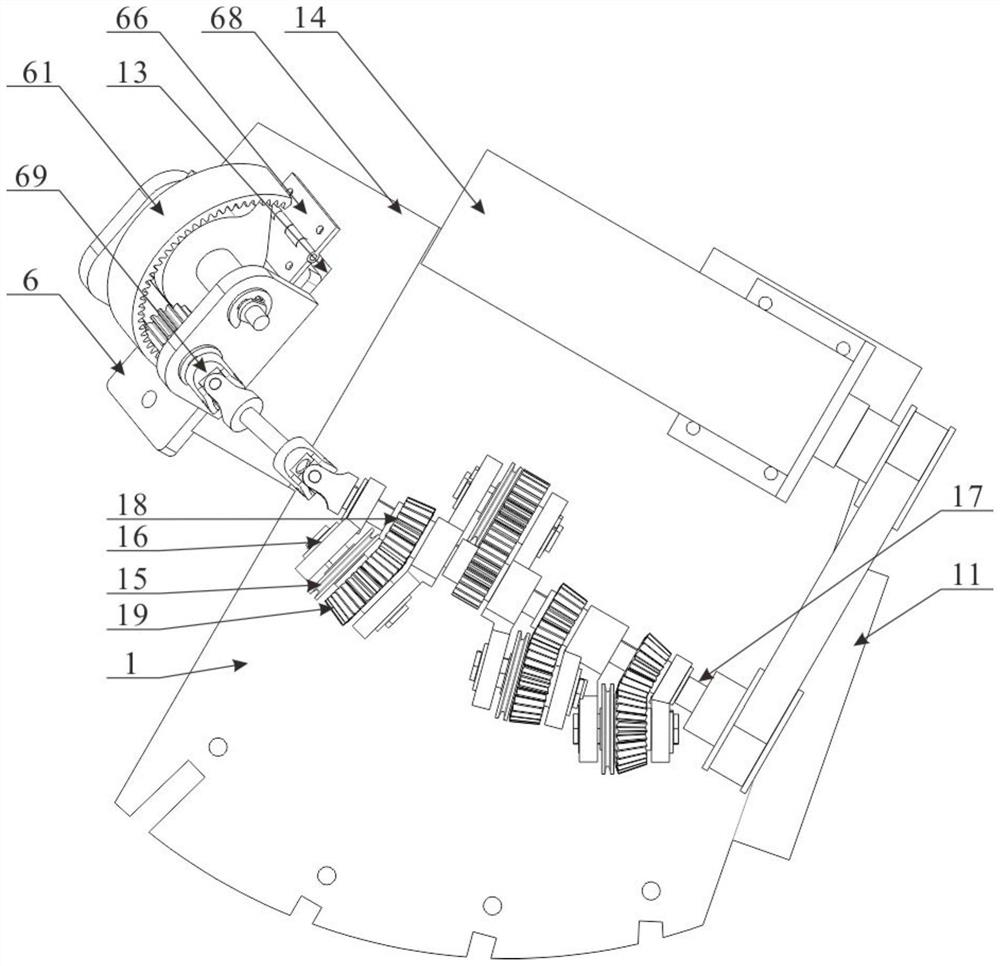
[0031] Specifically, such as figure 2 As shown, the two sides of the backboard 1 are respectively provided with an outer curved plate 11 and a thumb plate 68, the outer curved plate 11 cooperates with the outer muscles of the hand, and there is an inclination between the thumb plate 68 and the back plate 1, so as to adapt to the back of the thumb and the thumb plate 68. There is an inclination feature between the backs of the hands, so as to better fit the hands and facilitate fixing.
[0032] A motor 14 is arranged on the backboard 1, and the motor 14 is located at the rear end of the backboard 1. The output end of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com