Rope pulling-type flexible lower limb exoskeleton power-assisted robot and motion control method thereof
An exoskeleton and flexible technology, applied in the field of medical machinery, can solve the problems of poor active power, small size and weight, and insufficient driving accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0070] The present invention will be further described below in conjunction with the accompanying drawings.
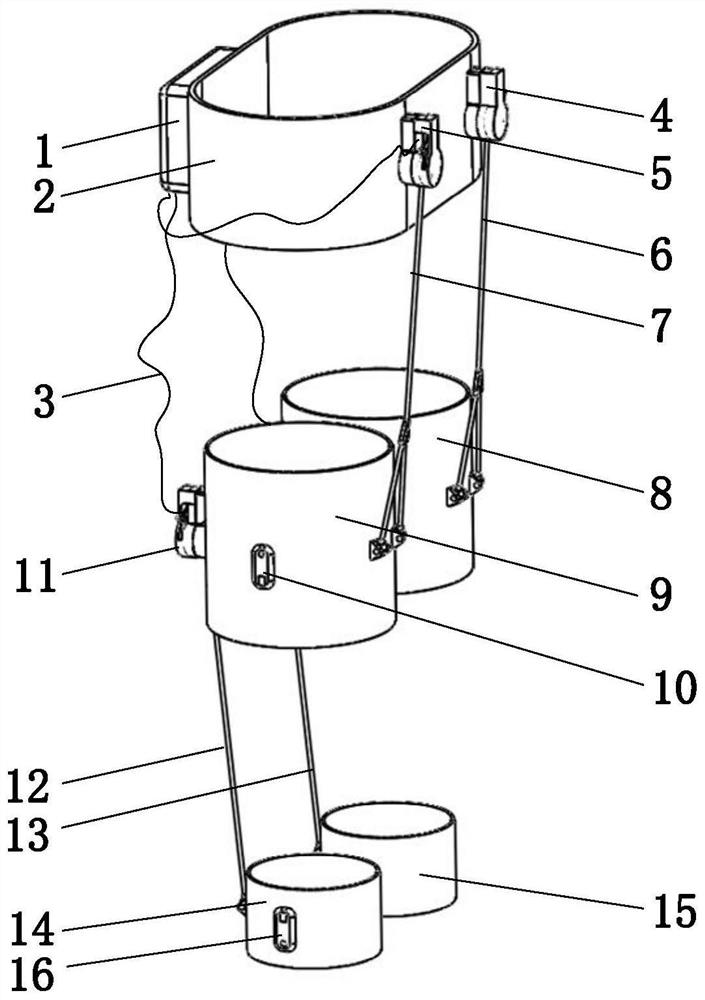
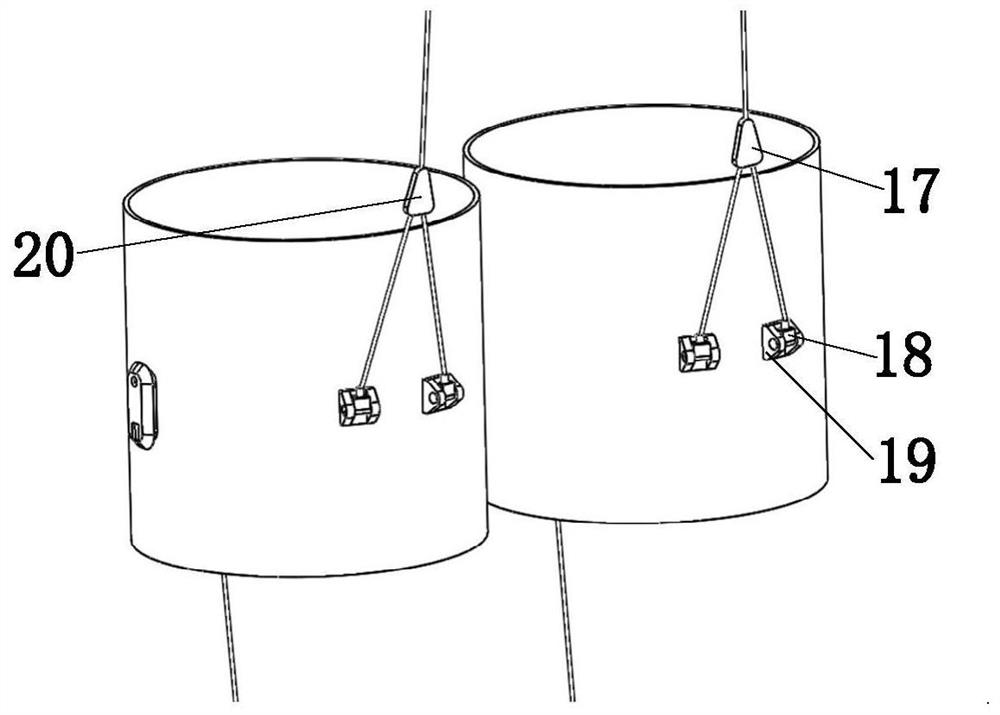
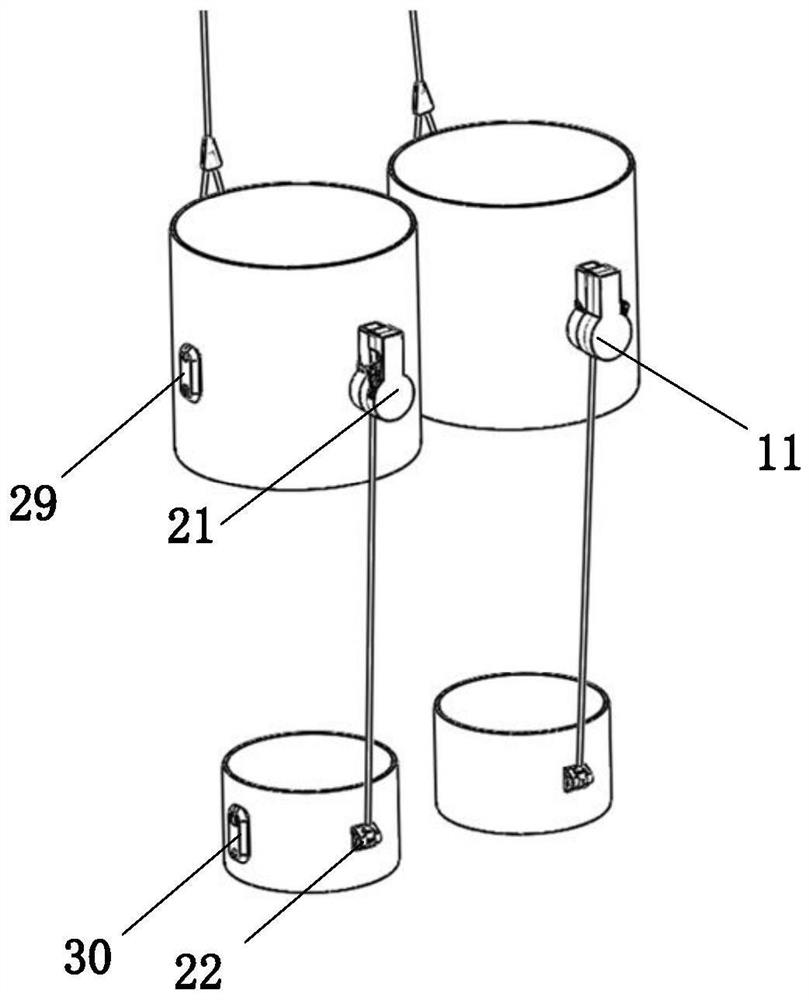
[0071] Such as figure 1 , 2As shown in and 3, a rope-pull type flexible lower limb exoskeleton power-assisted robot includes a waist wearing binding 2, a waist control box 1, a right thigh inclination sensor 10, a left thigh inclination sensor 29, a right thigh Calf inclination sensor 16, left calf inclination sensor 30, left hip joint driving device 4, right hip joint driving device 5, left hip joint assisting steel rope 6, right hip joint assisting steel rope 7, Wear harness 8 on the left thigh, wear harness 9 on the right thigh, wear harness 14 on the right calf, wear harness 15 on the left calf, wear the right knee joint driver 11, and wear the left Knee joint driving device 21, right side knee joint power-assisted steel rope 12 and left side knee joint power-assisted steel rope 13. The two ends of the waist-wearing binding piece 2 are connected by Velcro for we...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com