


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Unmanned formula car multi-sensor fusion sensing decision and tracking control method
A multi-sensor fusion, formula racing technology, applied in the direction of adaptive control, general control system, control/regulation system, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
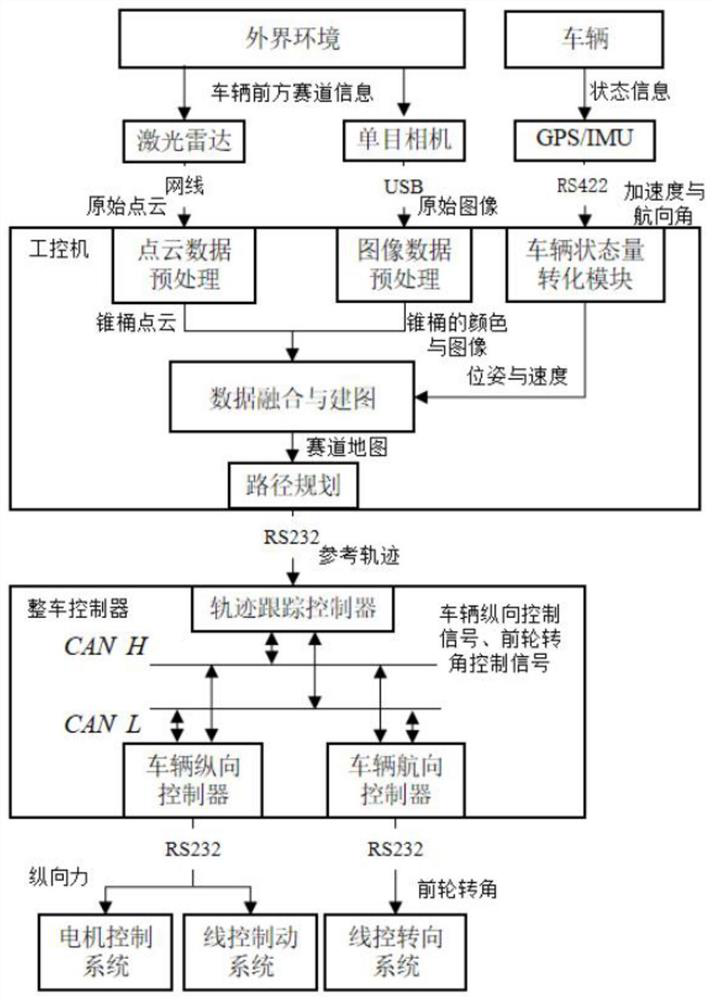
[0121] Embodiment: the perception decision-making and tracking control method of multi-sensor fusion of unmanned formula racing car, such as figure 2 Shown, comprise unmanned formula racing car (hereinafter referred to as racing car), be provided with industrial computer, trajectory tracking controller and actuator in the racing car, described industrial computer is connected with lidar, monocular camera, GPS and IMU, described GPS It is a global positioning system GPS and an inertial sensor, and the IMU is an integrated multifunctional sensor. The GPS has a positioning function, and the inertial sensor IMU has the function of a sensor that detects acceleration and rotational motion. Since the GPS and IMU are existing conventional devices, the specific structure will not be repeated here. The trajectory tracking controller is connected with an execution control system, and the execution control system is connected with the executive mechanism; the industrial computer respecti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com