Target area avoidance relative pose integrated control method considering rectangular field of view
A technology of relative pose and target area, which is applied in the direction of spaceflight equipment, spaceflight vehicles, spaceflight vehicle guidance devices, etc., and can solve the problems of small maneuverable space and large constraint range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0097] Specific implementation mode one: the target area considering the rectangular field of view described in this implementation mode avoids the relative pose integration control method, which includes:
[0098] Step 1: Establish a relative pose integration model;
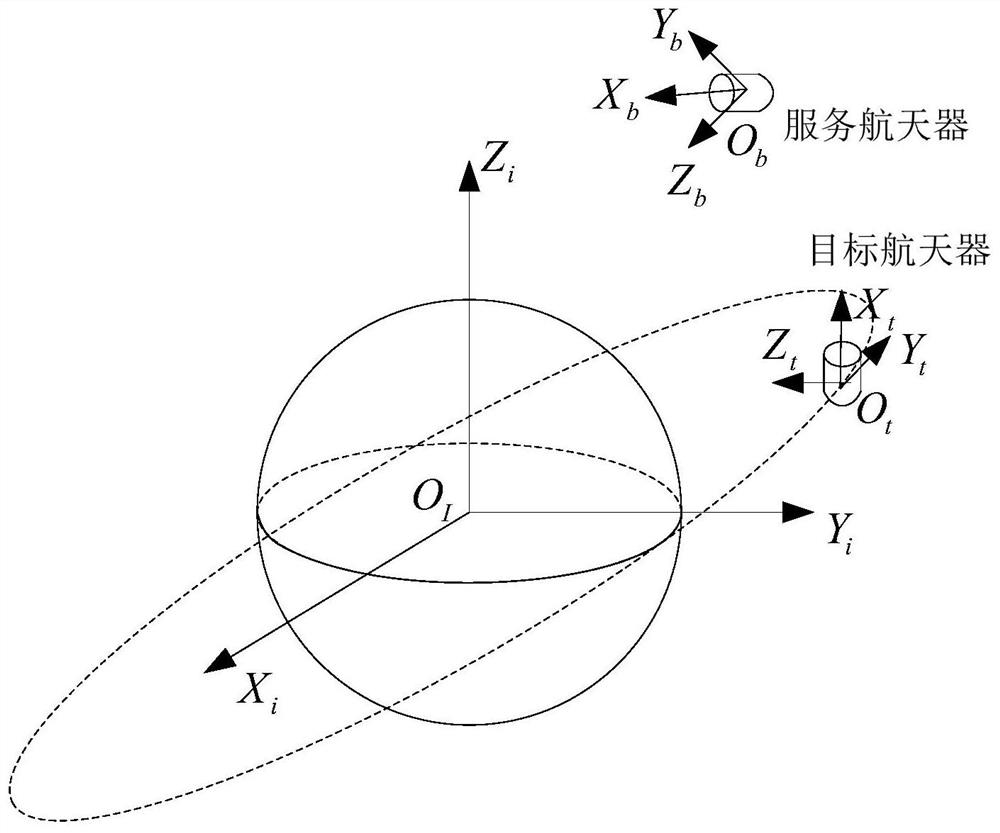
[0099] (1) Define the relevant coordinate system as the basis for model establishment, such as figure 2 shown;
[0100] a) Define the geocentric inertial coordinate system O i x i Y i Z i ;
[0101] The geocentric inertial coordinate system is expressed as O i x i Y i Z i , where O i is the center of mass of the earth, O i x i Axis by O i Pointing to the intersection of the flat ecliptic and flat equator at epoch J2000.0, O i Z i Axis perpendicular to the epoch J2000.0 flat equator and pointing toward the North Pole, O i x i Y i Z i into a right-handed coordinate system.
[0102] b) Define the service spacecraft body coordinate system O b x b Y b Z b ;
[0103] The body coordinate syste...
specific Embodiment approach 2
[0218] Embodiment 2: This embodiment differs from Embodiment 1 in that this embodiment describes that the artificial potential function has a unique minimum value, that is, the potential function is a convex potential function. Prove that the total potential function is convex by proving that each term in the potential function is convex. For the convenience of proof, the "vector" notation of dual quaternions is introduced, namely:
[0219]
[0220] (1) Attractive potential function;
[0221] First prove that the attractive potential function is a convex function, and obtain the attractive potential function pair The first-order and second-order partial derivatives of are:
[0222]
[0223] ▽ 2 V a =2k a A T A>0 (72) where A is and The transformation matrix between, that is
[0224] The second-order partial derivative of the attractive potential function is greater than 0, indicating that the attractive potential function is a convex function.
[0225] (2)...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com