


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Outer forklift parking robot with blocking tooth structure and parking implementation method of outer forklift parking robot
A technology of robots and forklifts, applied in the field of parking robots, can solve the problems that the vehicle cannot be squeezed onto the fork arm, and the vehicle is easy to slip off.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
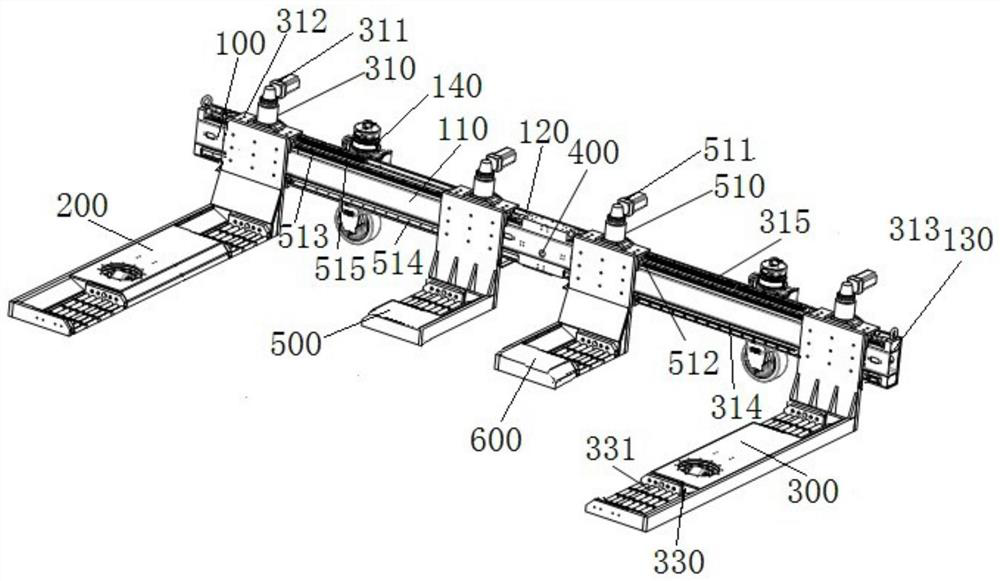
[0059] This embodiment relates to a parking robot with gear tooth structure, such as figure 1 As shown, the robot includes:
[0060] Vehicle frame 100, the vehicle frame 100 is a straight structure, and its length is fixed;
[0061] Active running device 140, the active running device 140 is installed on the vehicle frame 100, and is used to drive the vehicle frame 100 to move;
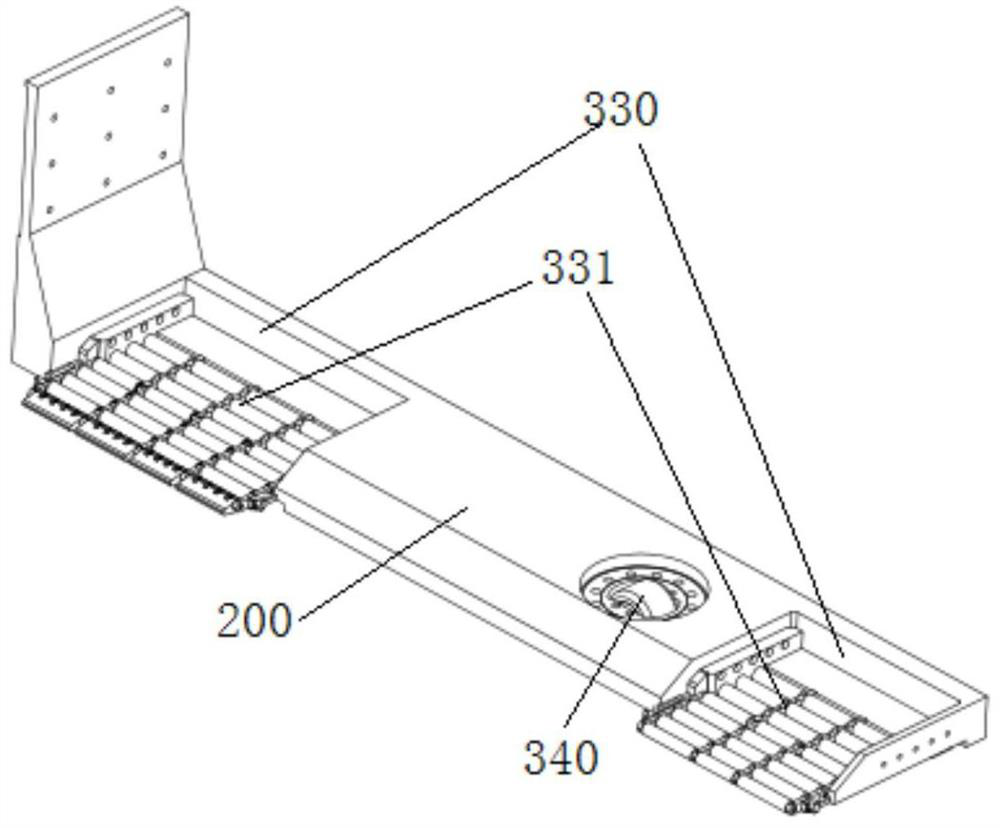
[0062] The left fork arm 200 and the right fork arm 300 with the same symmetrical structure, the left fork arm 200 and the right fork arm 300 are respectively installed at the two ends of the same side of the vehicle frame 100, and the distance between them is adjustable;
[0063] Universal wheel 340, the universal wheel 340 is installed on the left fork arm 200 and the right fork arm 300, to meet the driving requirements of the parking robot, and as a supporting structure;
[0064] The left gear tooth 500 and the right gear tooth 600 with the same symmetrical structure, the left gear tooth 500 and ...
Embodiment 2
[0079]In this embodiment, it relates to a parking robot with gear tooth structure, such as Figure 7 shown. The parking robot has a similar structure to the parking robot in Embodiment 1, only the structures or positions of the vehicle frame 100 and the photoelectric sensor 400 are different.
[0080] Wherein, the length of the vehicle frame 100 is adjustable, and the position where the length can be adjusted is at the middle position of the inline vehicle frame 100 . The length-adjustable position is installed with an intermediate connecting piece 150 , and both ends of the intermediate connecting piece 150 are plugged and positioned in the middle of the corresponding vehicle frame 110 .
[0081] The front panel 110 of the vehicle frame 100 is provided with two photoelectric sensors 400 at positions close to the adjustable length.
Embodiment 3
[0083] This embodiment relates to the parking realization method of the above-mentioned embodiment 1 or embodiment 2, and the method includes the following contents:
[0084] S1: After receiving a signal from the user confirming to store or pick up the car, control the parking robot to the side close to the vehicle until the distance between the parking robot and the vehicle is less than or equal to the predetermined first transport distance;
[0085] When the user sends a signal to park or pick up the car through the parking management system, if the user parks the car, the management system obtains information such as the location of the parking exchange space, the location of the parking space to be parked, and the route of the parking robot. Therefore, the parking robot can be controlled to travel to the side close to the vehicle according to the position of the parking exchange space until the distance between the parking robot and the vehicle is less than or equal to the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com