Environment situation assessment method for autonomous grabbing of underwater visual target
A situation assessment and environment technology, applied in the field of computer vision, can solve the problems of no environment situation assessment strategy and insufficient factors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] The embodiment of the present invention will be explained in detail below in conjunction with the accompanying drawings. The examples given are only for the purpose of illustration, and cannot be interpreted as limiting the present invention. The accompanying drawings are only for reference and description, and do not constitute the scope of patent protection of the present invention. limitations, since many changes may be made in the invention without departing from the spirit and scope of the invention.
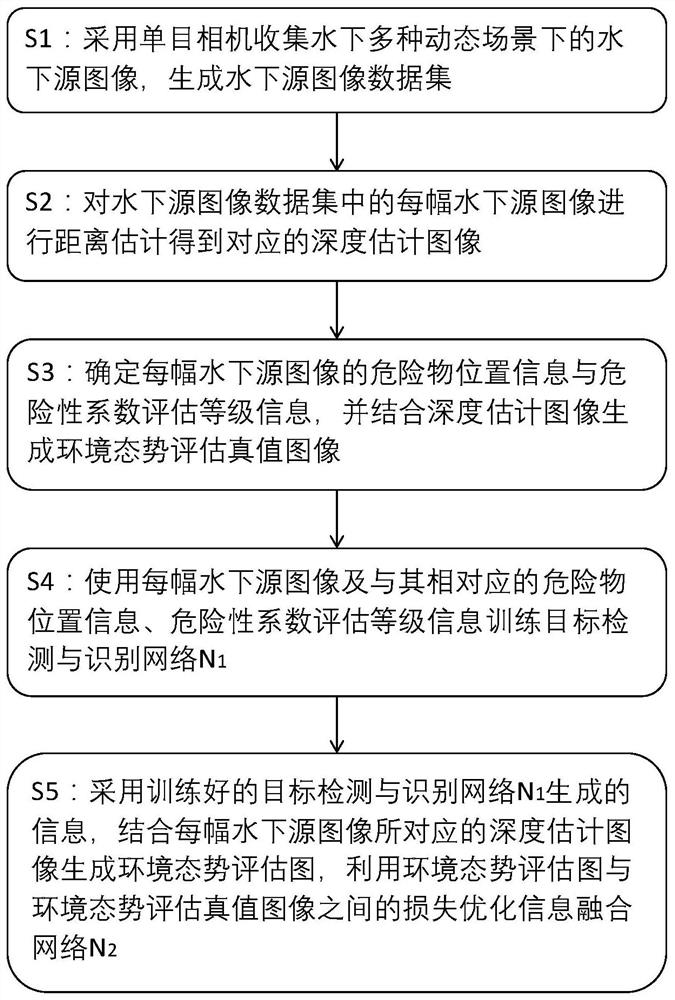
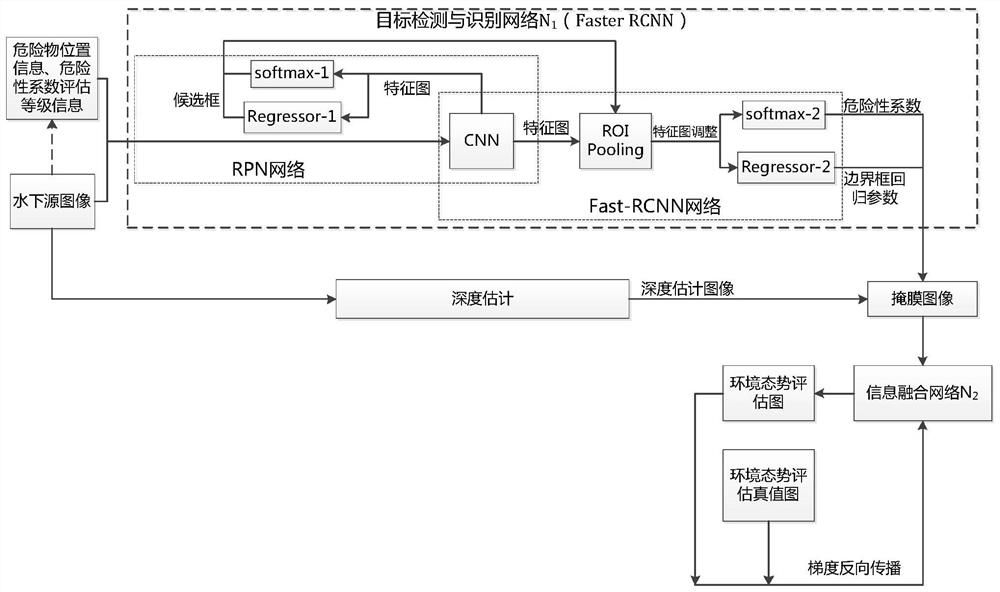
[0058] In order to conduct a more complete situation assessment for the autonomous grasping of underwater visual targets by robots, an embodiment of the present invention provides an environmental situation assessment method for autonomous grasping of underwater visual targets, as shown in figure 1 The flow chart of the steps shown specifically includes steps S1-S5. The processing process of various data in this embodiment is as follows: figure 2 shown.
[0059] (...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com