Unmanned aerial vehicle forced landing method and device, unmanned aerial vehicle and storage medium
A drone and forced landing technology, applied in the field of drones, can solve problems such as spending a lot of time searching
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
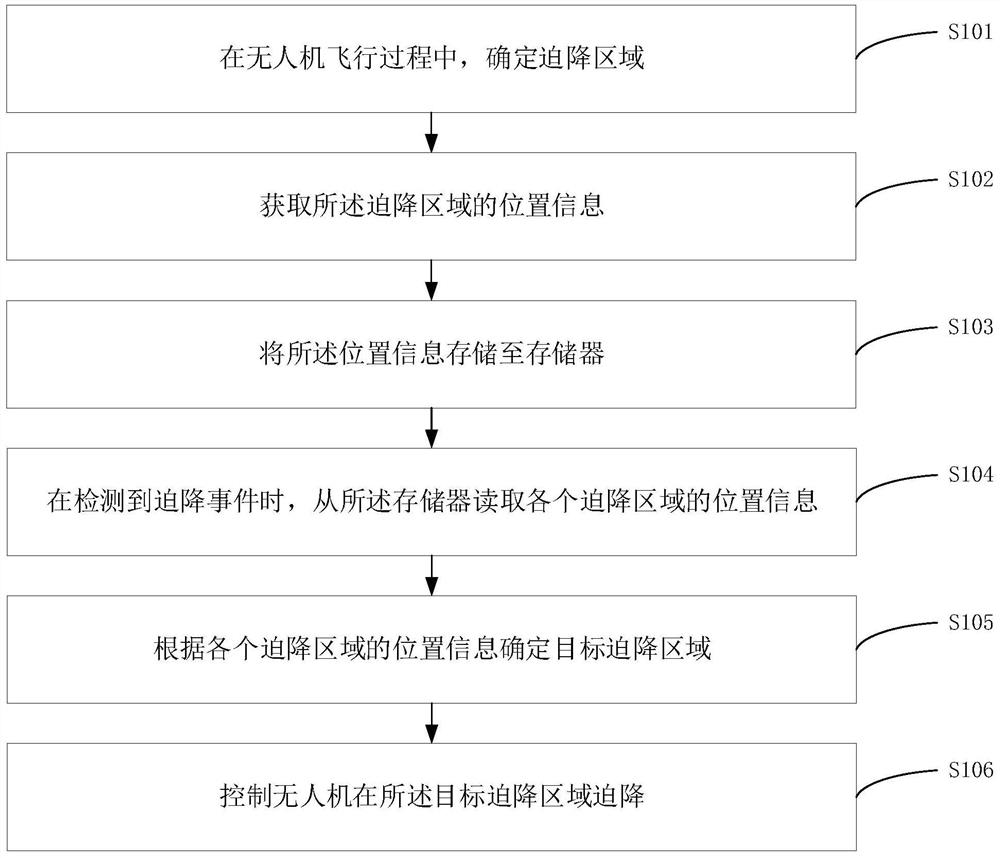
[0123] figure 1 It is a flow chart of the steps of a UAV forced landing method provided by Embodiment 1 of the present invention. This embodiment of the present invention is applicable to the situation of UAV emergency landing. Aircraft forced landing device to implement, the device can be implemented in the form of software and / or hardware, and integrated in the UAV, such as figure 1 As shown, the method specifically includes the following steps:
[0124] S101. During the flight of the UAV, determine the forced landing area.
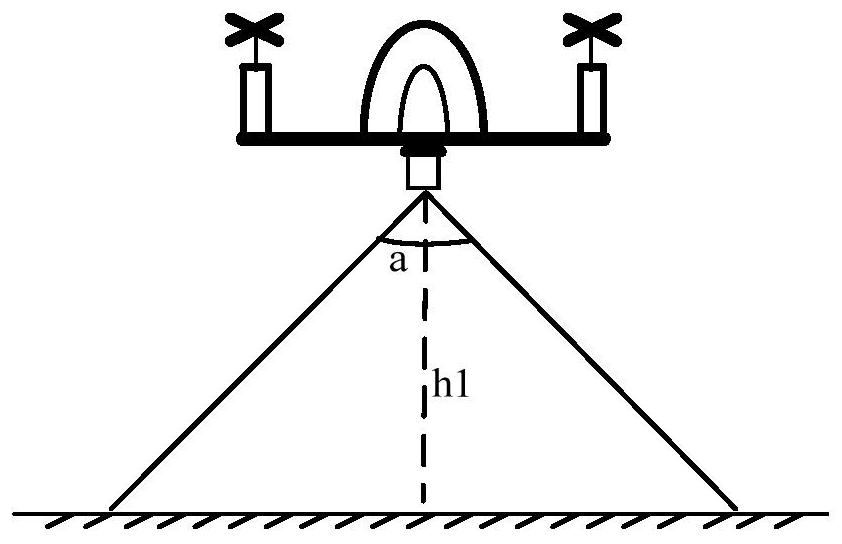
[0125] In practical applications, the UAV is equipped with a depth sensor and a radar. Both the depth sensor and the radar can face the bottom of the UAV. The depth sensor has a certain viewing angle, which can obtain depth images for the area that can be covered on the ground.
[0126] Optionally, the depth of field sensor can be a camera, and the camera can be one of a binocular camera, a monocular camera, and a multi-eye camera, and a depth image i...
Embodiment 2
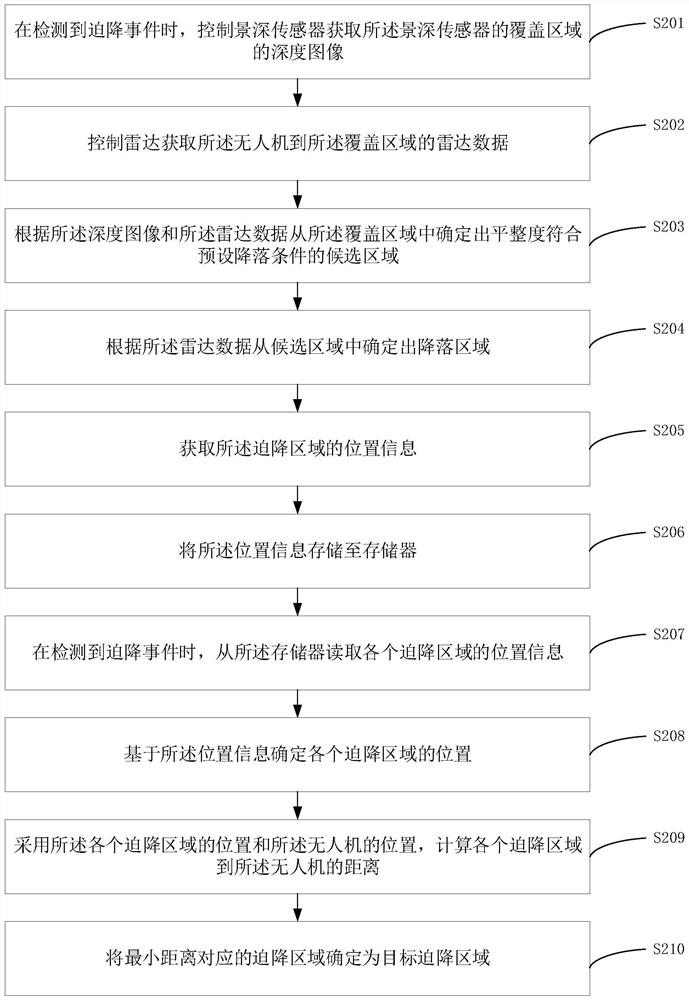
[0139] Figure 2A The step flow chart of a UAV forced landing method provided by Embodiment 2 of the present invention. The embodiment of the present invention is optimized on the basis of the foregoing Embodiment 1, and provides an example of determining the forced landing area and controlling the forced landing of the UAV in the forced landing area. sexual implementation methods, specifically, such as Figure 2A As shown, the method in the embodiment of the present invention may include the following steps:
[0140] S201. When an emergency landing event is detected, control a depth sensor to acquire a depth image of a coverage area of the depth sensor.
[0141] In the embodiment of the present invention, the forced landing event may be an event that causes the UAV to fail to continue its normal flight, for example, it may be a mechanical failure, insufficient power, or a sensor failure.
[0142] In practical applications, the UAV is equipped with a depth sensor and a rad...
Embodiment 3
[0214] image 3 The step-by-step flow chart of a UAV forced landing method provided by Embodiment 3 of the present invention. The embodiment of the present invention is optimized on the basis of the foregoing Embodiment 1, and provides an example of determining the forced landing area and controlling the forced landing of the UAV in the forced landing area. sexual implementation methods, specifically, such as image 3 As shown, the method in the embodiment of the present invention may include the following steps:
[0215] S301. During the flight of the UAV, determine the forced landing area.
[0216] S302. Acquire location information of the forced landing area.
[0217] S303. Store the location information in a memory.
[0218] S304. When an forced landing event is detected, read position information of each forced landing area from the memory.
[0219] S305. Determine the position of the drone.
[0220] S306. Determine the location of each forced landing area based on t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com