Exoskeleton walking aid system and control method
A control method and technology of an exoskeleton robot, applied in the field of medical devices, can solve the problems of ineffective rehabilitation training of patients and single function of the walker, and achieve the effect of improving the effect of walking assistance, improving the cadence, and reducing the walking load.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
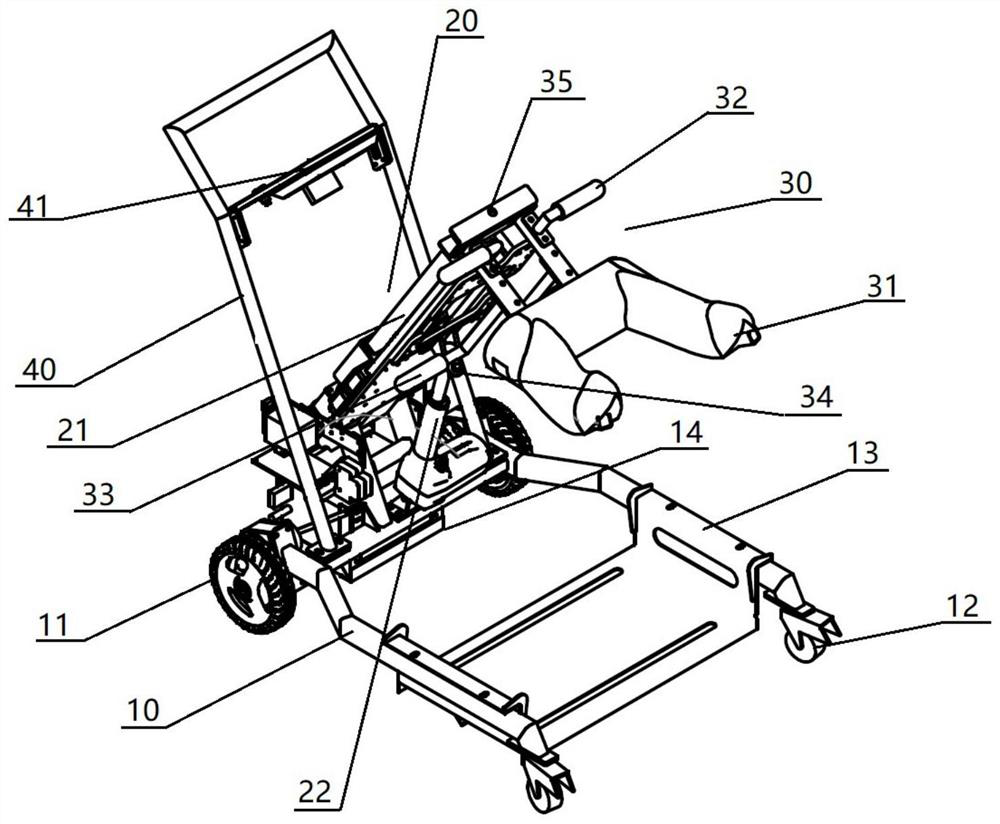
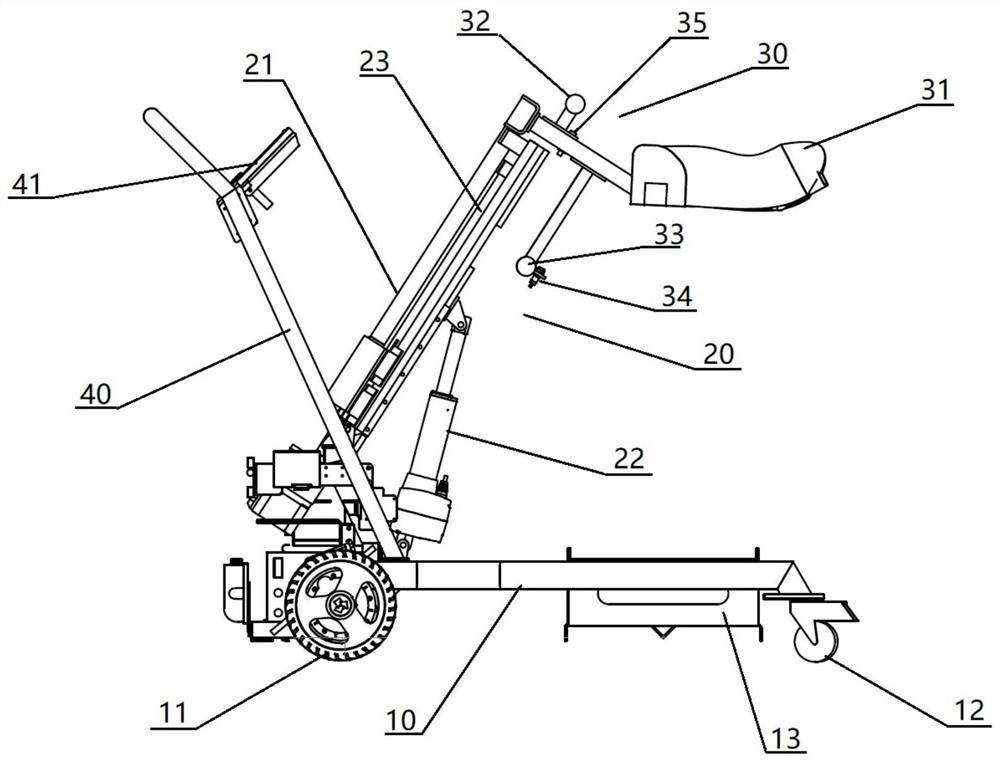
[0054] see figure 1 , the present embodiment provides an exoskeleton walker system, including a walker, an exoskeleton robot and a cloud platform, the exoskeleton robot and the walker are connected by wireless communication, the walker is connected to the cloud platform by wireless communication, and the wireless communication The connection method can be Bluetooth, WiFi, radio frequency, etc.; the exoskeleton robot is used to provide assistance for the user when walking, obtain the user's gait parameters and send them to the walker; the walker is used to support and pull the user to walk, and download the Or upload user information, operate according to the information obtained from the cloud platform and set parameters, and send the set parameters to the exoskeleton robot, so that the exoskeleton robot operates according to the set parameters.
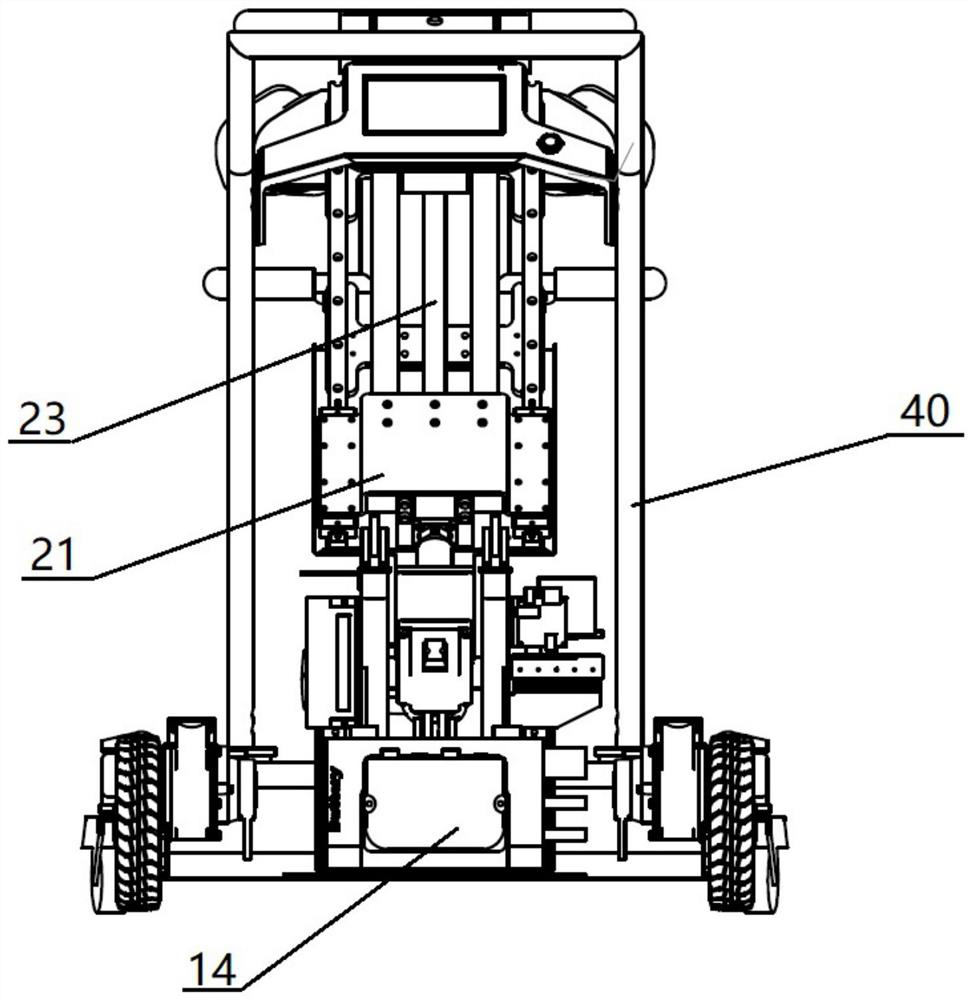
[0055] The walker includes a chassis frame 10 , a telescopic rotating arm 20 , a support bracket 30 and an interactive push rod 40 ...
Embodiment 2
[0070] This embodiment provides an exoskeleton walking aid control method, comprising the following steps:
[0071] Step 1: Obtain user information. The acquisition method is: if it is a new user, enter the user information on the display screen of the controller; if it is not a new user, download and read the user information from the cloud platform. The user information includes: user number, gender , height, weight, cases, training time, etc.;
[0072] Step 2: Set the training duration and gait parameters according to the user information. The gait parameters include step frequency, step speed, etc.;
[0073] Step 3: The walker and exoskeleton robot move according to the set gait parameters;
[0074] Step 4: The exoskeleton robot monitors the user's gait parameter data in real time, and transmits the user's gait parameter data to the controller of the walker, and the screen on the controller of the walker displays the user's gait parameters in real time. The controller ti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com