Unmanned aerial vehicle trajectory tracking method based on differential flatness characteristics
A technology of differential flatness and trajectory tracking, applied in nonlinear system automatic control, underactuated, highly coupled, time-varying fields, can solve problems such as high computational complexity, difficult application, no method, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0074] The present invention will be described in detail below with reference to the accompanying drawings and examples.
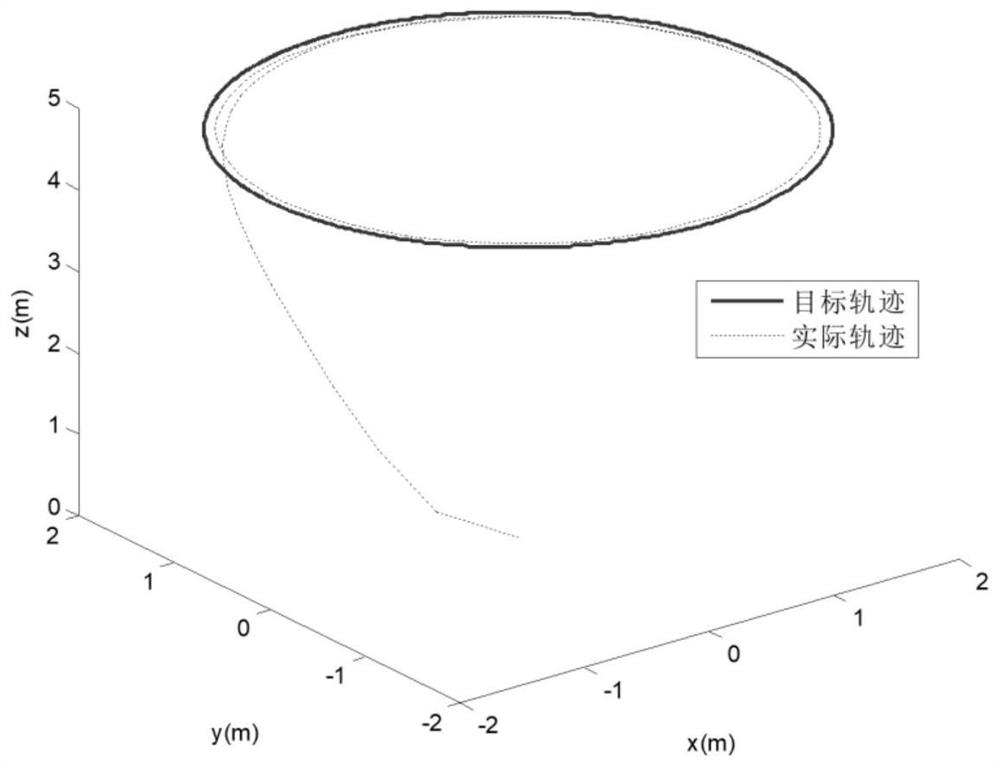
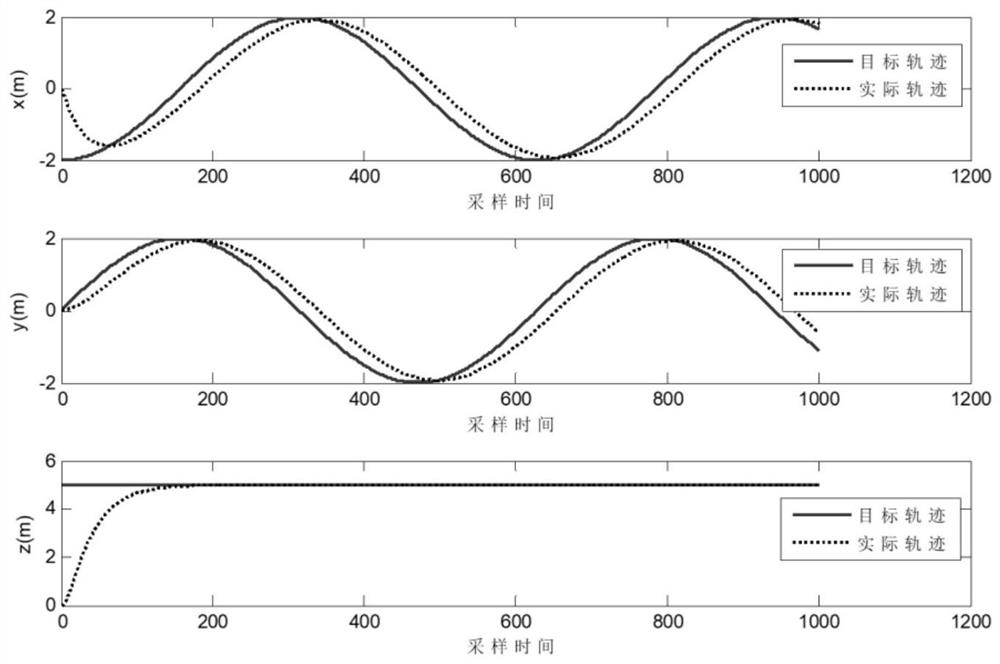
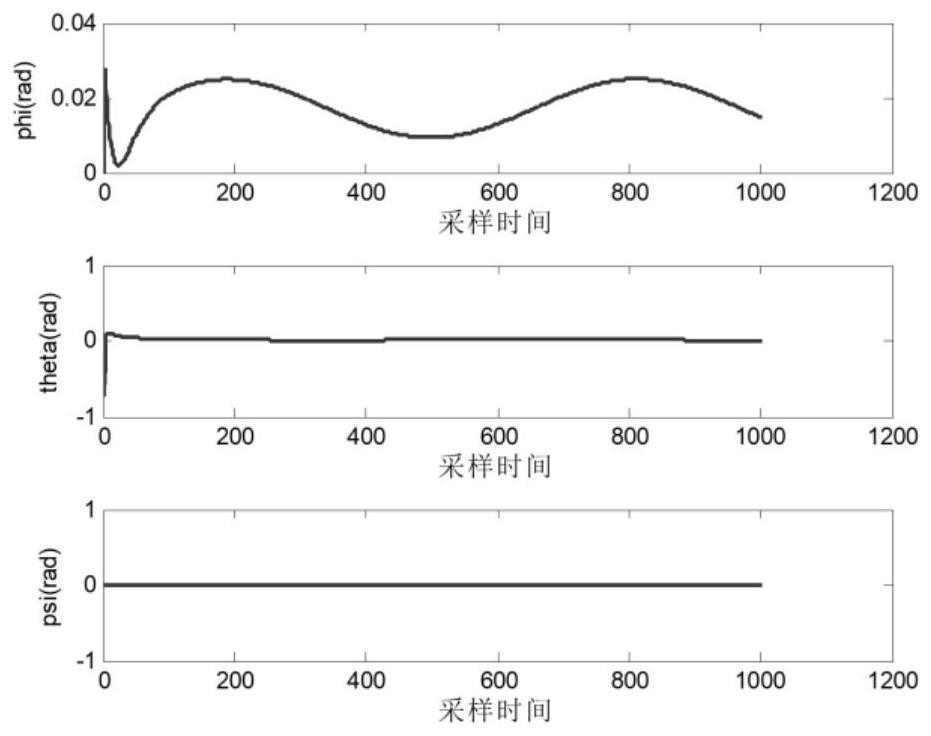
[0075] The present invention models the dynamics and kinematics of the quadrotor aircraft, and judges the differential flat property of the model, and converts the underactuated quadrotor model into a full-drive system through nonlinear changes based on this property. Set virtual control variables to decouple highly coupled systems and transform them into linear systems. Using model predictive control to deal with the track tracking control problem of constrained systems, according to the time-varying characteristics of the system, construct a polyhedron description system including the original time-varying system, reduce the computational complexity of online optimization, and deduce the real-time terminal penalty to make the system stable value.
[0076] A UAV trajectory tracking control method based on differential flatness and model predictive contro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com