Epidemic prevention robot knowledge learning and migration method and system
A knowledge learning and robotics technology, applied in the field of knowledge learning and transfer of epidemic prevention robots, can solve problems such as difficult application, insufficient training samples, and high training overhead, and achieve the effect of online knowledge transfer
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0075]Such asfigure 1 As shown, this implementation discloses a knowledge learning and migration method for epidemic prevention robots, which includes the following steps S1 to S6:
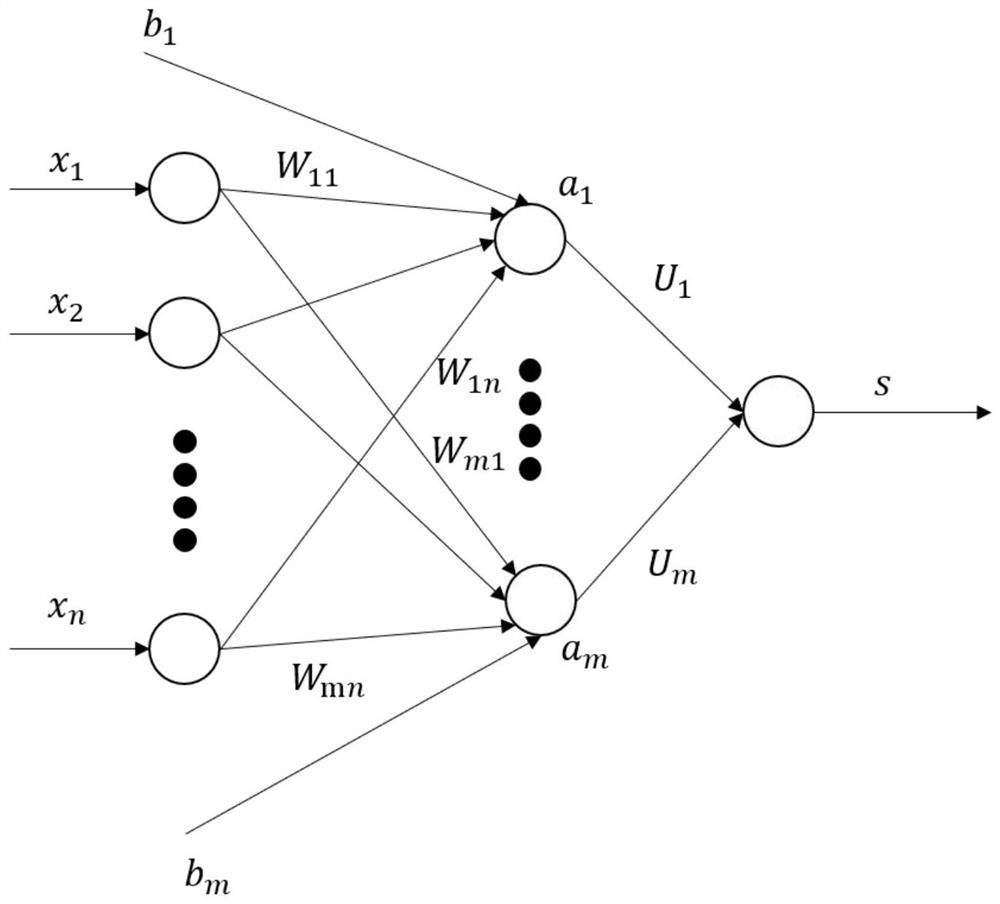
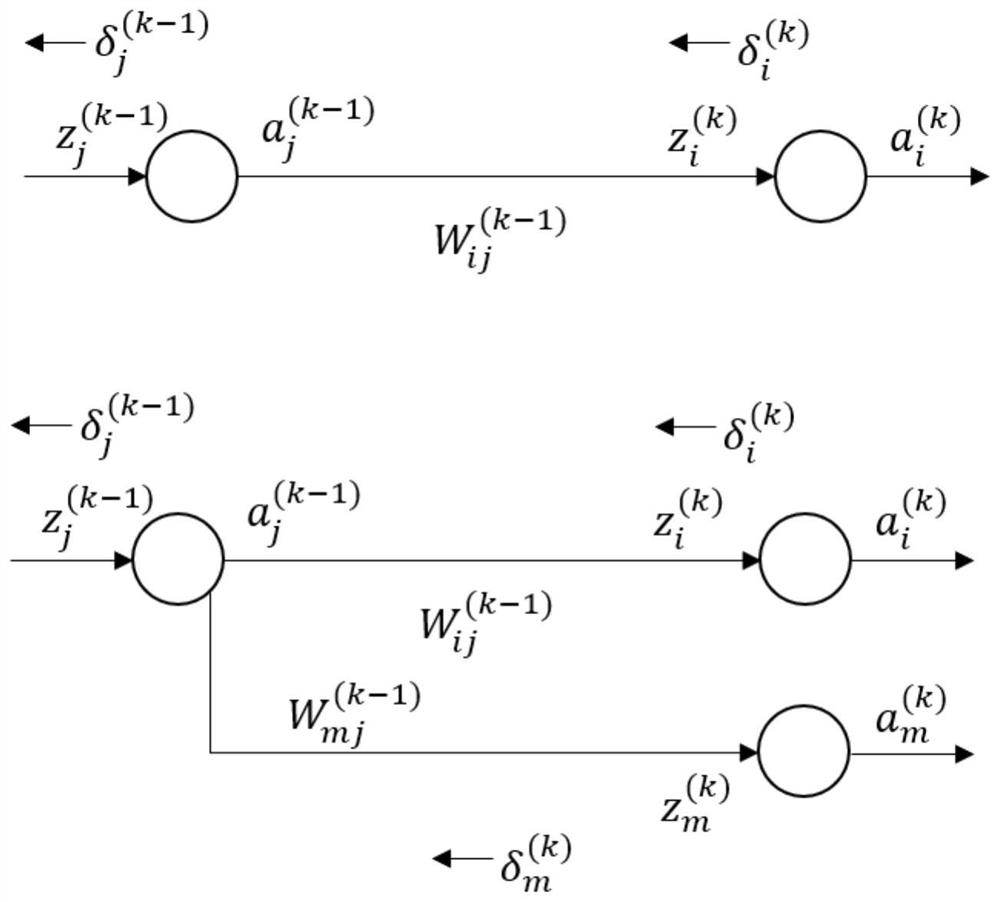
[0076]S1. On the basis of constructing the knowledge base of epidemic prevention robots, according to the overall task planning, the independent task unit after subtask decomposition, the construction of multi-task sub-networks; the use of independent sub-task joint actions, indoor environment, robot movement The data set of the path, the sub-network model of each sub-task is trained; the sub-neural network containing multiple learnable parameters is defined, the input sub-task data set is iterated, and the input environment and movement are processed through the multi-layer sub-network structure The data is forwarded, and the difference between the output value and the target value is calculated at the same time, the gradient is propagated back to the parameters of the sub-neural network, and finally the ...
Embodiment 2
[0092]The knowledge learning and migration method of the epidemic prevention robot provided according to the present invention includes:
[0093]1. Epidemic prevention robots build knowledge base and knowledge learning knowledge transfer process design
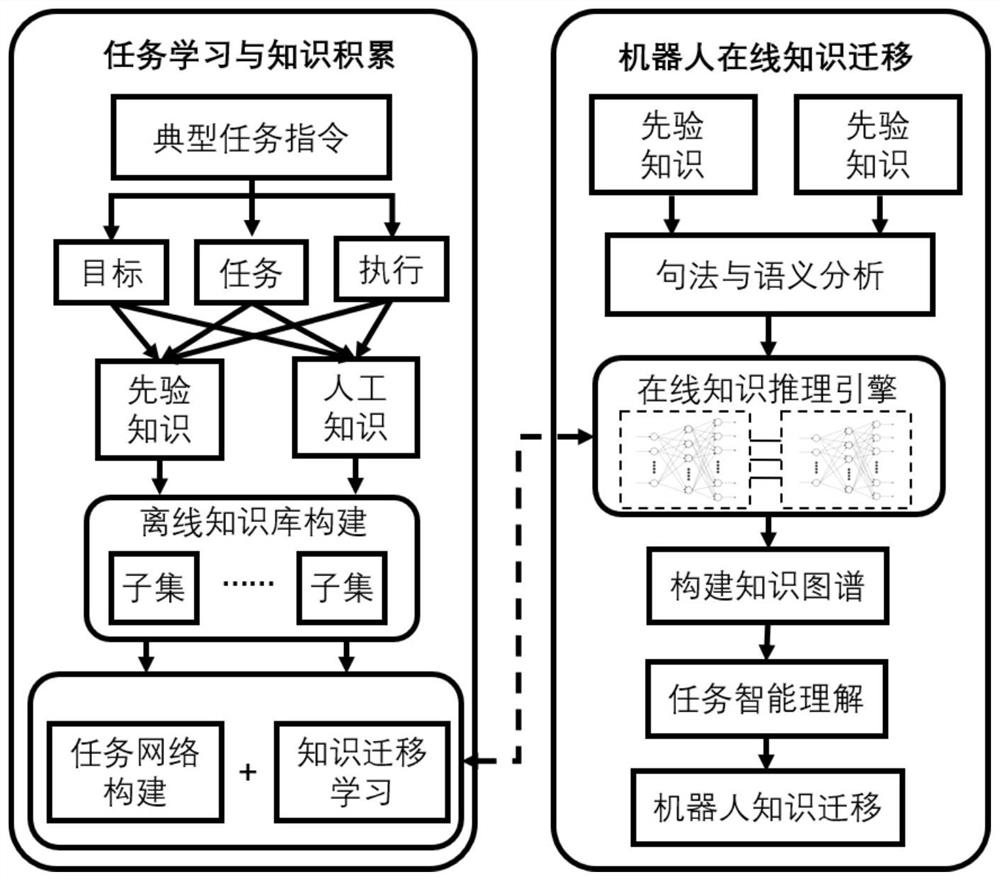
[0094]Such asfigure 1 As shown, the task learning and knowledge accumulation and online knowledge transfer of epidemic prevention robots include task decomposition, offline knowledge base construction, task network construction and knowledge transfer learning, construction of online knowledge reasoning engine, construction of knowledge graph, task intelligence understanding and robot knowledge migrate. The functions of each part are as follows:
[0095](1) Perform task decomposition
[0096]Describe the data model of the robot task description and its expression method, decompose the tasks of the robot, establish a model of the robot's change to the task state, and describe the target state of each task and the new target state based on the mod...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com