


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Realistic road test scenario selection and planning method for intelligent driving mobile devices
A mobile device, road testing technology, applied in vehicle testing, machine/structural component testing, measuring devices, etc., to achieve the effect of ensuring test coverage and high test efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
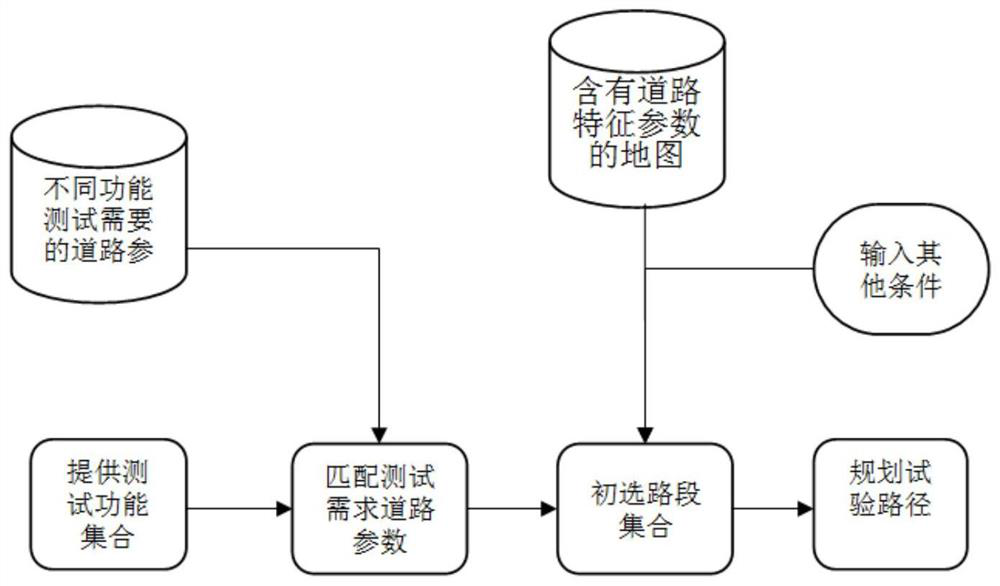
[0024] like figure 1 As shown, the actual road test scene selection and planning method of the intelligent driving mobile device of the present invention includes the following steps:
[0025] Step 1. Match the road parameters required by the test for the road parameter table and test function set required for different functional tests:
[0026] The road parameter table and test function set required for different functional tests can be stored in the database by manual decomposition and entry. The matching test requires road parameters to be matched by a technician according to common knowledge.
[0027] Search for roads that meet the screening conditions in the processed map library with the matching road parameters required for testing and add them to the set of primary selected road sections;
[0028] For example, the curve radius, slope gradient, intersection, traffic lights, speed limit signs, etc. can be used as the road parameter items to be searched for test requir...
Embodiment 2
[0041] like figure 1 As shown, the actual road test scene selection and planning method of the intelligent driving mobile device of the present invention includes the following steps:
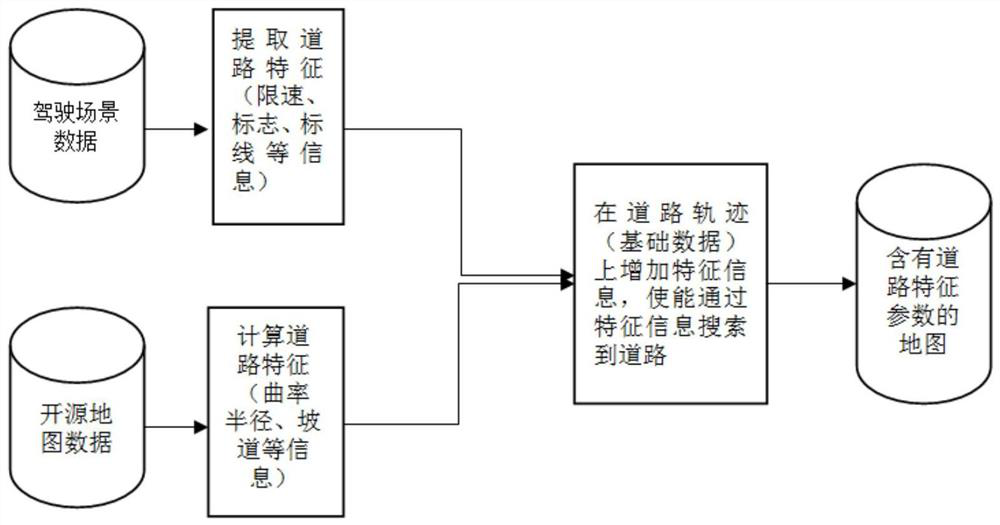
[0042] Step 1: Use the map containing the road characteristic parameters as the filter condition, and search out the roads that meet the filter conditions in the processed map library and add them to the set of preliminary selected road sections;
[0043] Step 2: Plan a test path according to the selected test road section.
[0044] a), for the primary selection road section set, add two test road sections determined corresponding to a screening condition to the test road section set, and calculate the shortest path between the two test road sections correspondingly determined by the screening condition as the primary selection shortest path;
[0045] b), calculate the shortest path from the starting point to the shortest path of each primary selection, and select a path with the shortest leng...
Embodiment 3
[0059] like figure 1 As shown, the actual road test scene selection and planning method of the intelligent driving mobile device of the present invention includes the following steps:
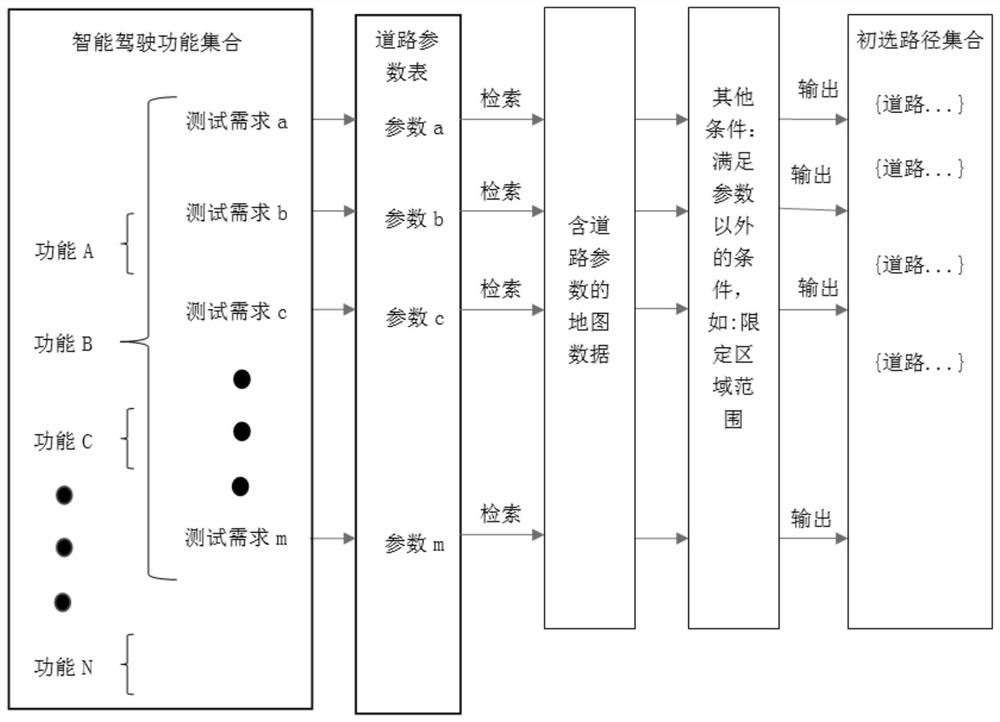
[0060] Step 1. Match the road parameters required by the test for the road parameter table and test function set required for different functional tests:
[0061] The road parameter table and test function set required for different functional tests can be stored in the database by manual decomposition and entry. The matching test requires road parameters to be matched by a technician according to common knowledge.
[0062] The matching test requirements road parameters and the map containing the road feature parameters are used as filter conditions. The filter conditions can also be other input conditions. Search the processed map library to find the roads that meet the filter conditions and add them to the set of preliminary selected road sections; The road parameters required for testing, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com