Heavy haul train reinforcement learning control method and system
A heavy-duty train and reinforcement learning technology, which is applied in general control systems, neural learning methods, control/regulation systems, etc., can solve complex process control that is not suitable for heavy-duty trains, poor performance of heavy-duty train control systems, and cumbersome calculations Complicated issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
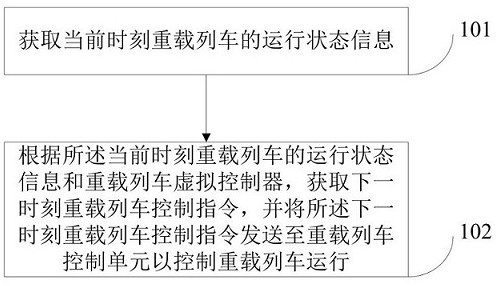
[0064] Such as figure 1 As shown, a heavy-duty train reinforcement learning control method provided in this embodiment includes the following steps.
[0065] Step 101: Obtain the running status information of the heavy-duty train at the current moment; the heavy-duty train is composed of a plurality of vehicles, and the vehicles include traction locomotives and ordinary freight cars; the running status information includes the speed of the heavy-duty train and the speed of the heavy-duty train Location.
[0066] Step 102: According to the running state information of the heavy-duty train at the current moment and the virtual controller of the heavy-duty train, obtain the control instruction of the heavy-duty train at the next moment, and send the control instruction of the heavy-duty train at the next moment to the heavy-duty train The control unit is used to control the operation of heavy-duty trains.
[0067] Wherein, the heavy-haul train virtual controller stores line inf...
Embodiment 2
[0084] Such as figure 2 As shown, the present embodiment provides a heavy-duty train reinforcement learning control system, including:
[0085] The information acquisition module 201 is used to obtain the running status information of the heavy-duty train at the current moment; the heavy-duty train is composed of a plurality of vehicles, and the vehicles include traction locomotives and ordinary freight cars; the running status information includes the speed of the heavy-duty train and heavy haul train positions.
[0086] The control command determination module 202 is configured to obtain the heavy-duty train control command at the next moment according to the running state information of the heavy-duty train at the current moment and the virtual controller of the heavy-duty train, and transfer the heavy-duty train control command at the next moment Send it to the heavy-duty train control unit to control the operation of the heavy-duty train.
[0087] Wherein, the heavy-ha...
Embodiment 3
[0098] In order to achieve the above purpose, the present embodiment provides a heavy-duty train reinforcement learning control method, the method comprising:
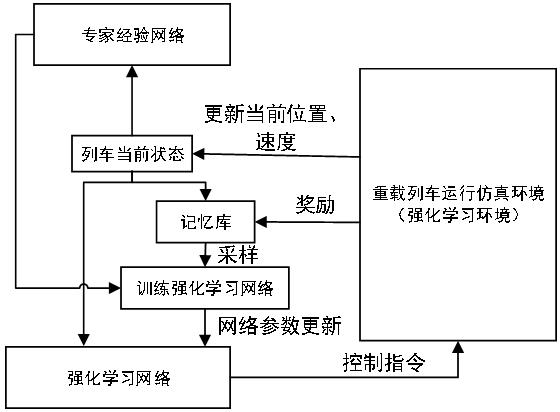
[0099] Step 1: Build a heavy-duty train virtual controller
[0100] The recurrent neural network is pre-trained by using the actual operation history data of the heavy-duty train to obtain the expert experience network; the running process of the heavy-duty train is modeled by using the longitudinal dynamic equation of the multi-particle train, and the kinematic model of the heavy-duty train is obtained, and then strengthened In the learning environment, determine the reward function of the running process of the heavy-duty train (used as a reward evaluation for the current control command), the kinematics model of the heavy-duty train and the reward function constitute a heavy-duty train operation simulation environment, and the heavy-duty train operation simulation environment is controlled by input command to update...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com