A route planning method and system for a sweeping robot, and a sweeping robot
A technology for sweeping robots and route planning, applied in the field of sweeping robots, can solve the problems of inability to cover corners and low cleaning efficiency, and achieve the effect of avoiding invalid cleaning problems, improving cleaning efficiency, and increasing the area that can be cleaned.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] In order to make the purpose, technical solutions and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the accompanying drawings and implementation examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
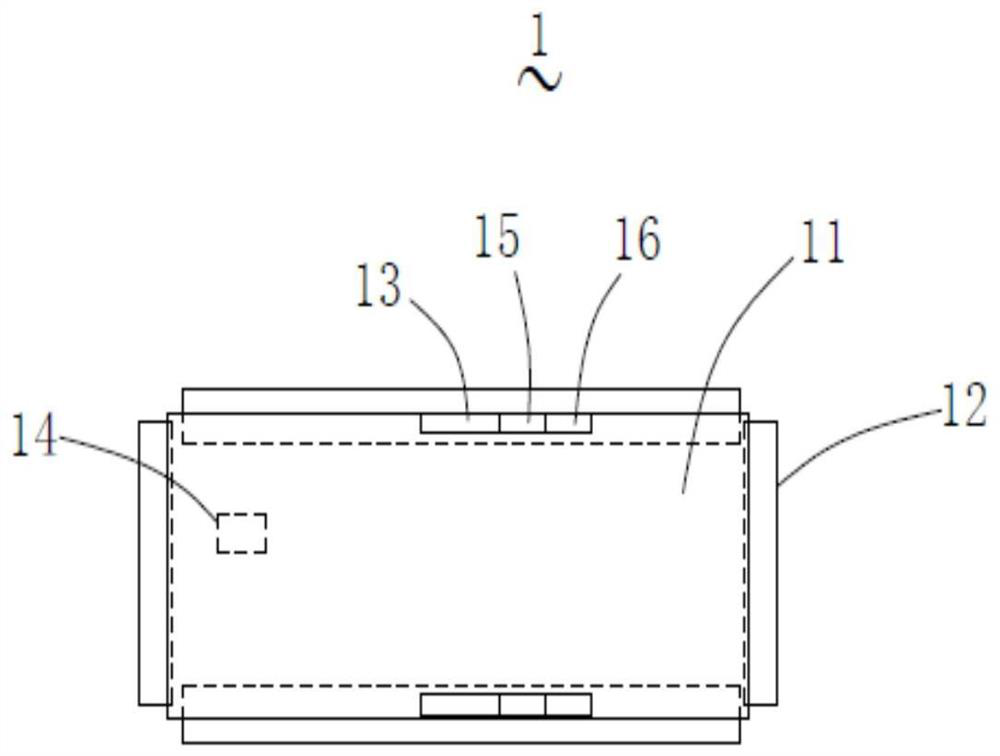
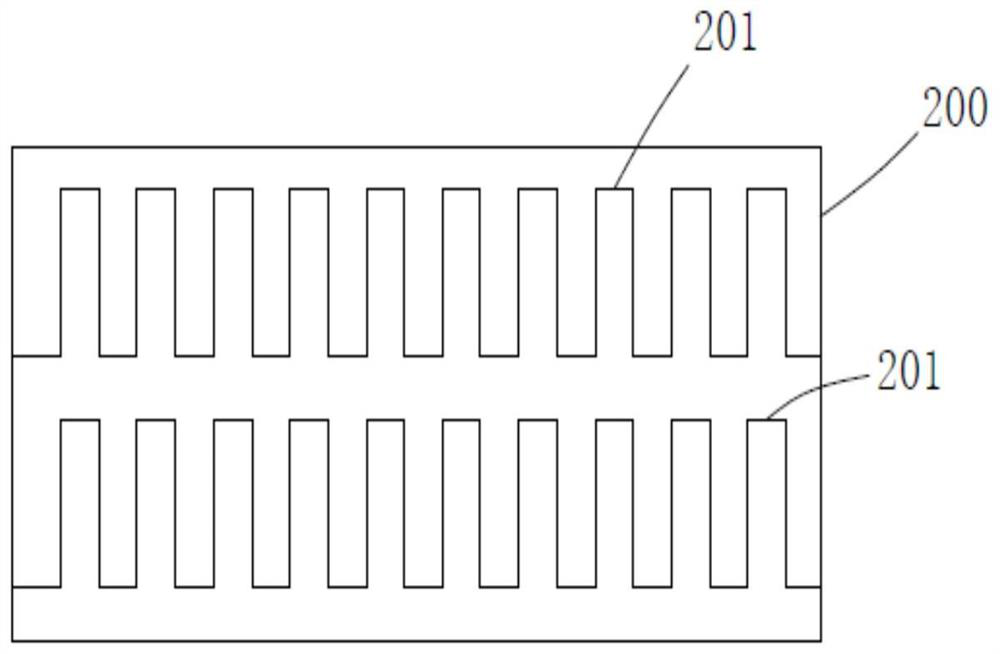
[0035] Please combine figure 1 and figure 2The first embodiment of the present invention provides a sweeping robot 1, including a housing 11, a cleaning element 12, a plurality of collision detectors 13 and a displacement detector 14, and the plurality of collision detectors 13 are arranged on the housing 11 On the outer peripheral side, the cleaning member 12 is arranged at the bottom of the housing 11 , and the displacement detector 14 is arranged in the housing 11 .
[0036] A plurality of collision detectors 13 are equidistantly arranged on the outer peripheral side of the h...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com