Multi-machine intelligent cooperative control system and method for knuckle boom cranes based on 5G network
A collaborative control, crane technology, applied in the direction of load hanging components, transportation and packaging, which can solve the problems of long transportation time, high torque, high stress, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
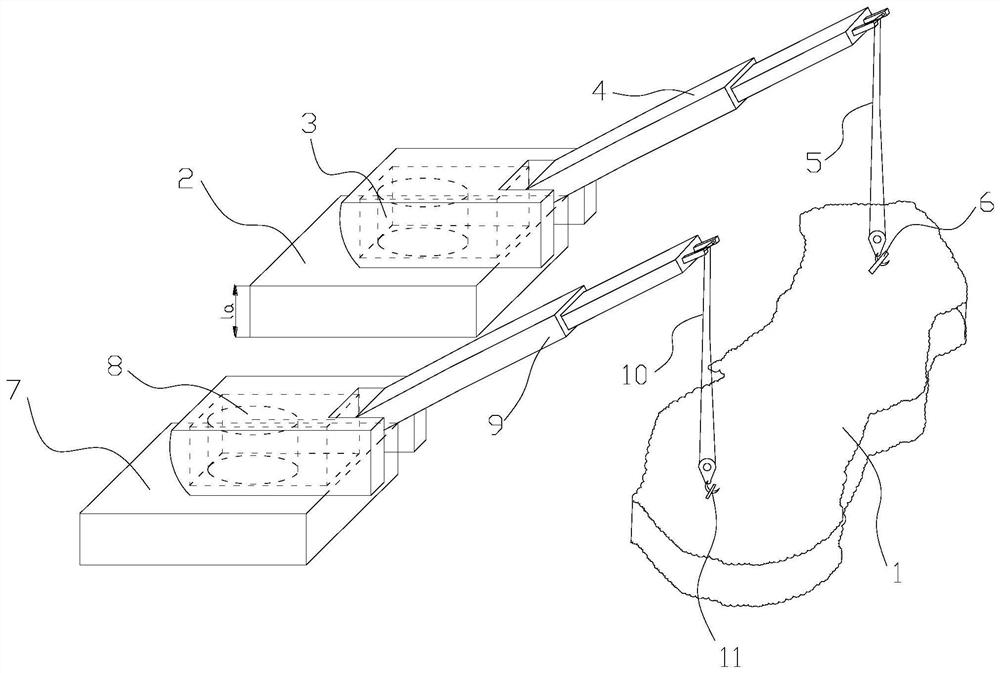
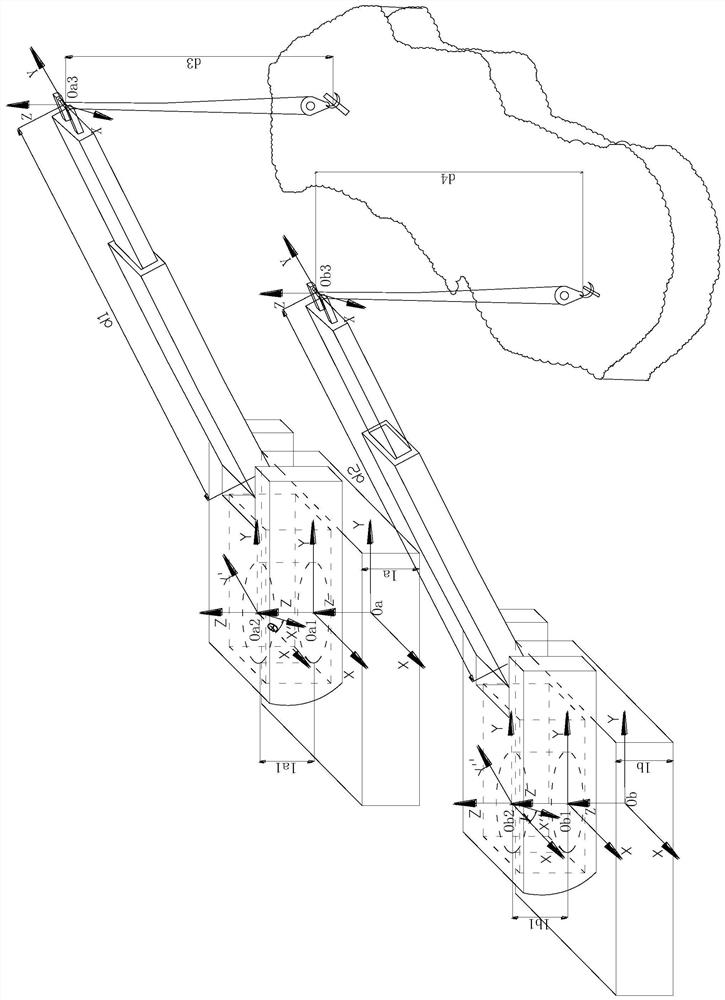
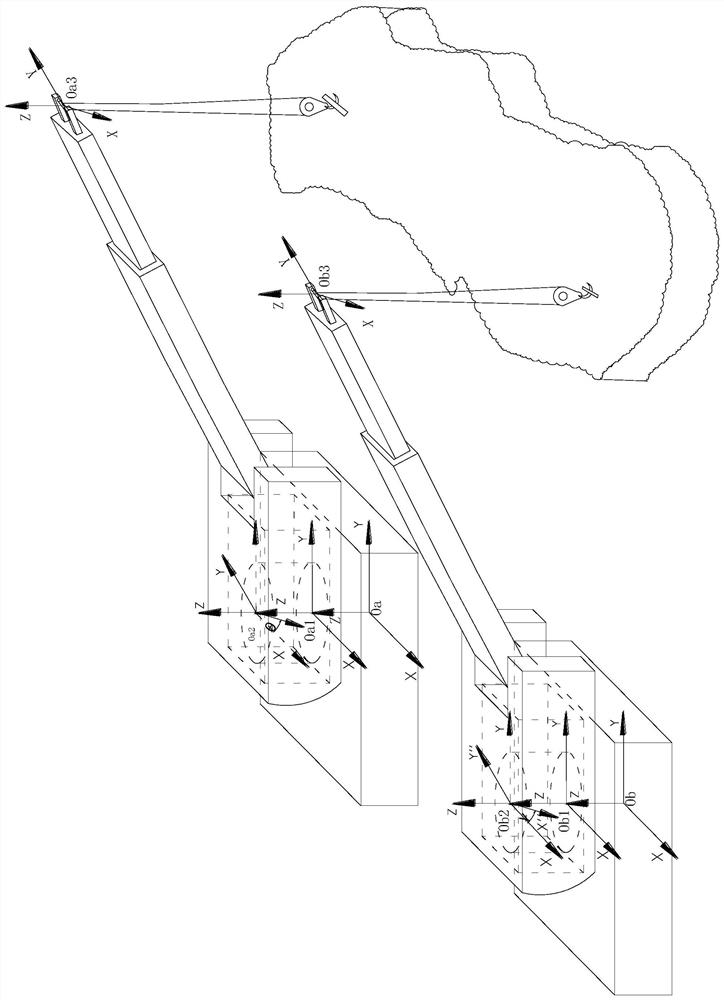
[0088] Such as Figure 1-7 Shown, the present invention will be further described below in conjunction with accompanying drawing:
[0089] A 5G network-based multi-machine intelligent collaborative control system and method for a knuckle-arm crane, including a plurality of parallel cranes; a car telescopic rope 5 and b car telescopic rope 10) and fixed buckle (comprising a car fixed buckle 6 and b car fixed buckle 11);
[0090] The mechanical arm is lifted or rotated on the lifting platform through a hydraulic lifting device; the hydraulic lifting device in this case has the same structure as the prior art, including a lifting device and a rotating device to realize the lifting and rotating functions of the mechanical arm;
[0091] One end of the telescopic rope is buckled on the end of the mechanical arm (the end away from the lifting platform), and the other end is connected with the hook lock;
[0092] The two ends of the fixing buckle are respectively fixed on the object...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com