Tongue-controlled hand rehabilitation robot system based on magnetic marker and operation method of tongue-controlled hand rehabilitation robot system
A technology of a rehabilitation robot and an operation method, which is applied in the field of a tongue-controlled hand rehabilitation robot system based on magnetic markers, can solve the problems of limiting the certainty of clinical diagnosis, weak signal strength, affecting the accuracy, etc., and achieves the promotion of hand function rehabilitation, The effect of high accuracy and simple equipment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
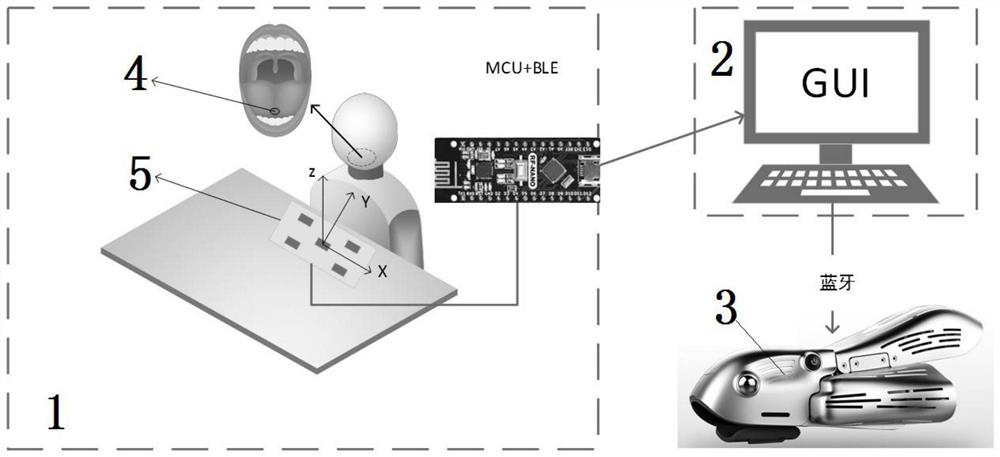
[0051] see figure 1 , the present invention provides a tongue-controlled hand rehabilitation robot system based on magnetic markers, including a magnetic signal acquisition system 1, a magnetic signal processing system 2 and a hand rehabilitation robot 3, and the magnetic signal acquisition system 1 includes a permanent magnet 4 and a sensor array 5. The permanent magnet is glued on the tip of the subject's tongue, and the sensor array is located under the subject's head, which is used to receive the magnetic signal and transmit the information to the magnetic signal processing system, which is used to process the signal into corresponding Tongue commands are sent to the hand rehabilitation robot, which executes the corresponding commands.
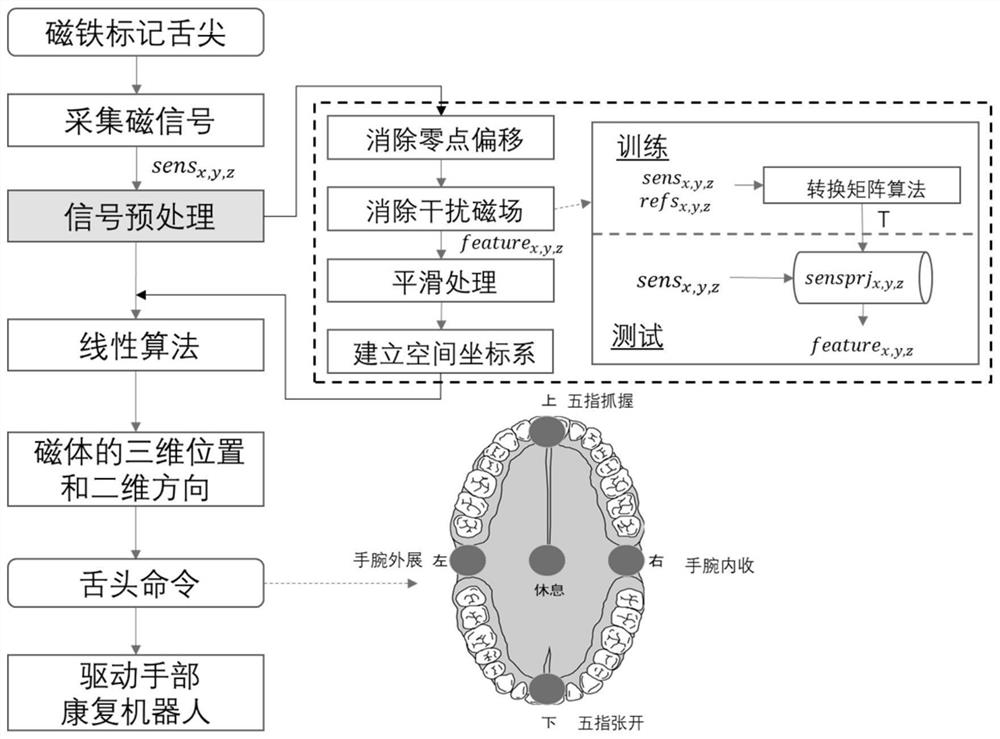
[0052] see figure 2 , the present invention a kind of tongue control hand rehabilitation robot operation method based on magnetic mark, comprises the following steps:
[0053] S1. Attach a permanent magnet to the tip of the tongue as a ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com